Fluid sensorial system of industrial robot
The aim of KAR STU studies was to present the possibilities of the control system realisation together with the simple tools position feedback.Fluid reflex sensor of direction (FRSV), was made with the use of planar technology, casting from epoxi resin or electro-spark maching of metal or other materials satisfy the technological requirements with the focus on the weld position. It’s characteristic feature was low price, high precision and sensitivite, simple service, etc. Fluid position sensors are as a result of research and development od many prototypes. It was supposed to be used for example for welding robot OJ 10, it’s operating modular work station used for cutting
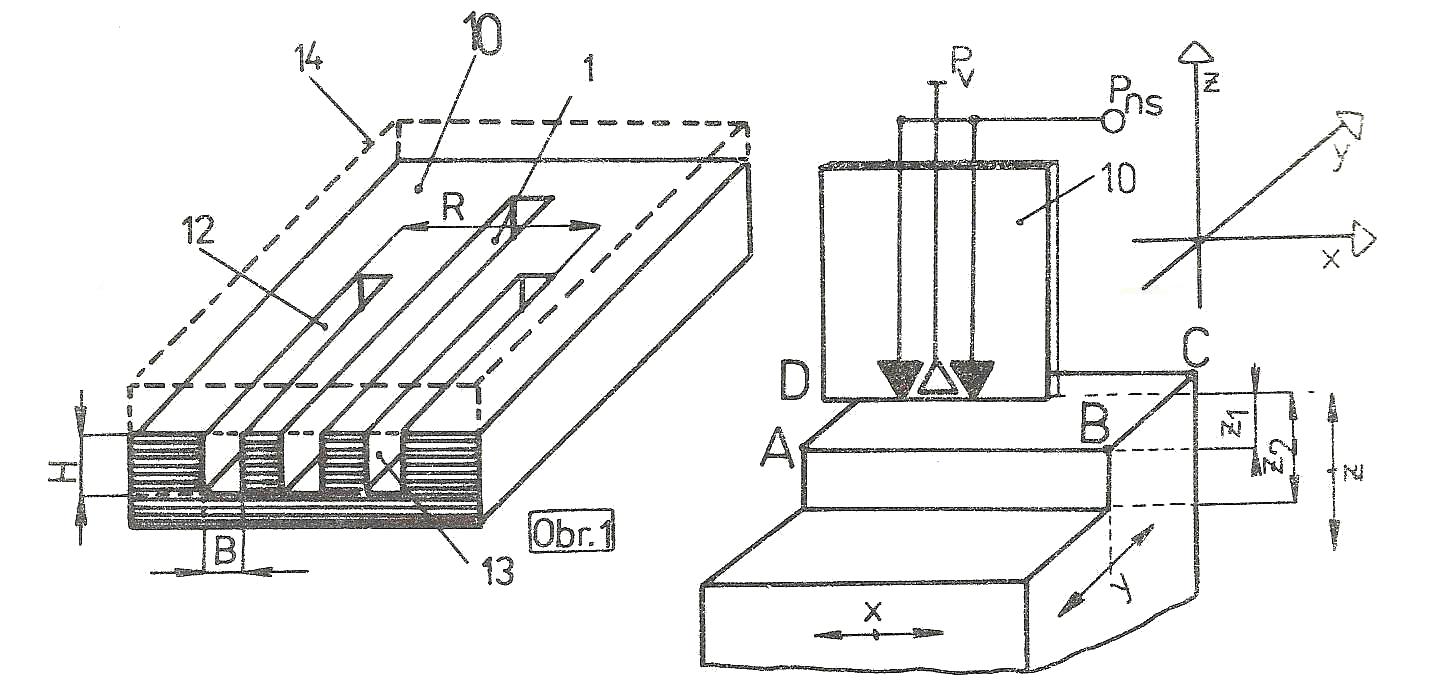
Description of FRSV activities:
FRSV consists of the couple of power supply cables 12 and 13, with the cable 11 and cap with 14 pis between them. Sensor solves the basic task of relative vertical distance measurements, functionally fixed to sensor that is placed on the technological head of robot, altogether with derived tasks that can be applied on these distance measurements.
Conclusion:
The main usage is in control circuits of adaptive correction in micro approach of system positioning of industrial robot in automatic navigation of welding head and also in electric cutting in the safety atmosphere
Developers:
Ing. Peter Drahoš, PhD. , Doc. Ing. Ján Šturcel, PhD.