ROTES
History:
During the years 1986 – 87 there was an idea to construct the assembling robot, that had the task to automatize the assembling labour by the production of the space connetions for the company TESLA. Development of the efamination enabled TESLA VRUSE and The Elektotechnical Department SVST in Bratislava that hat the great experience with the control of the stepping motors.
Utilization:
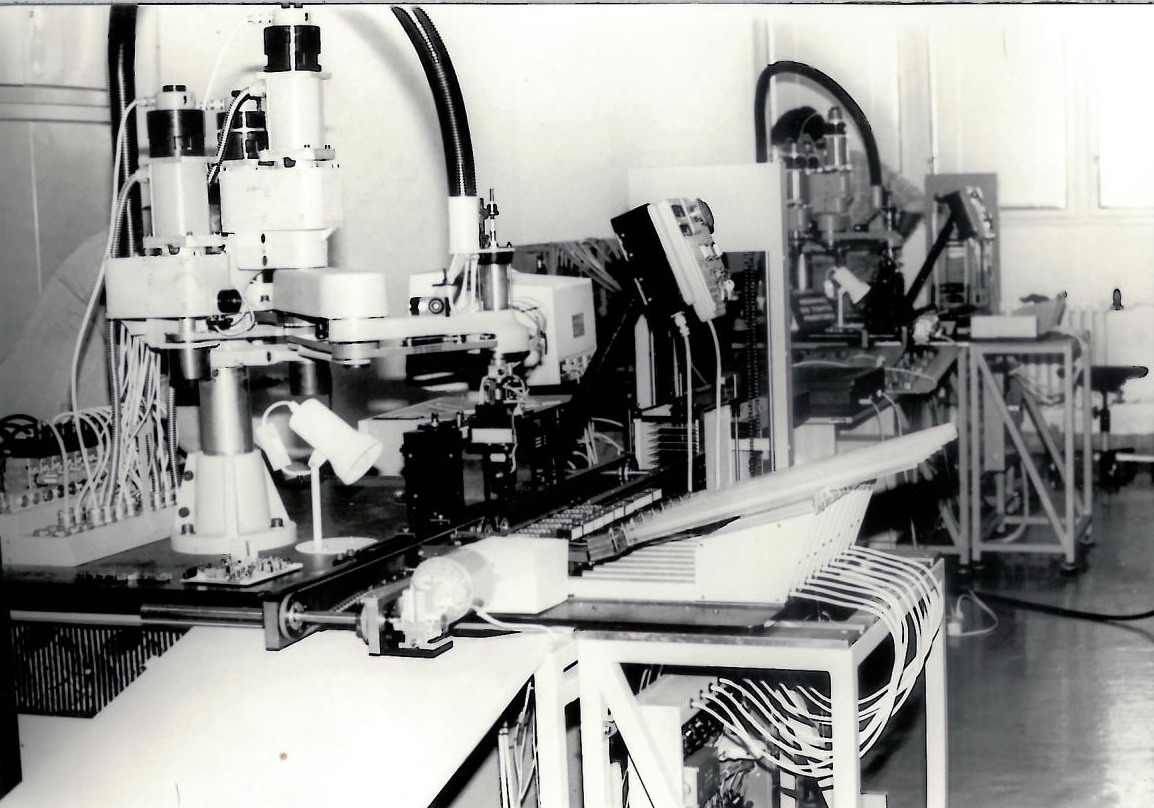
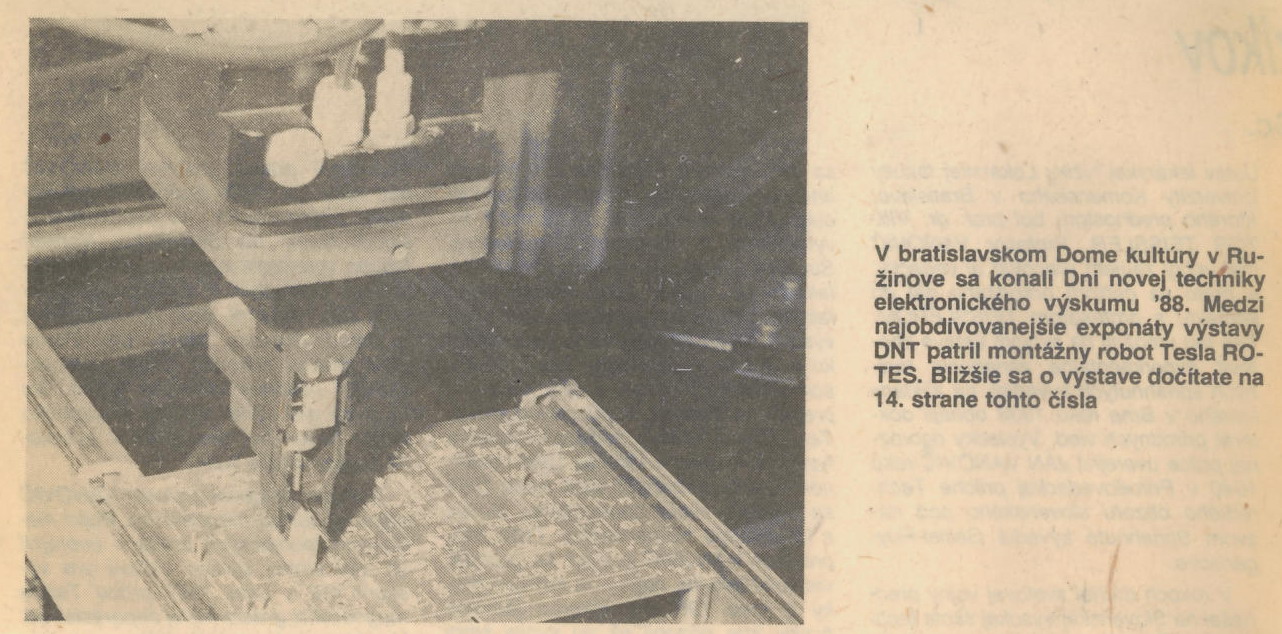
The main purpose of the robot was the establishment of the eletronical parts into the boards with the printed connetions for the radiogram and televison receiver, for the computers, etc.
Construction and control:
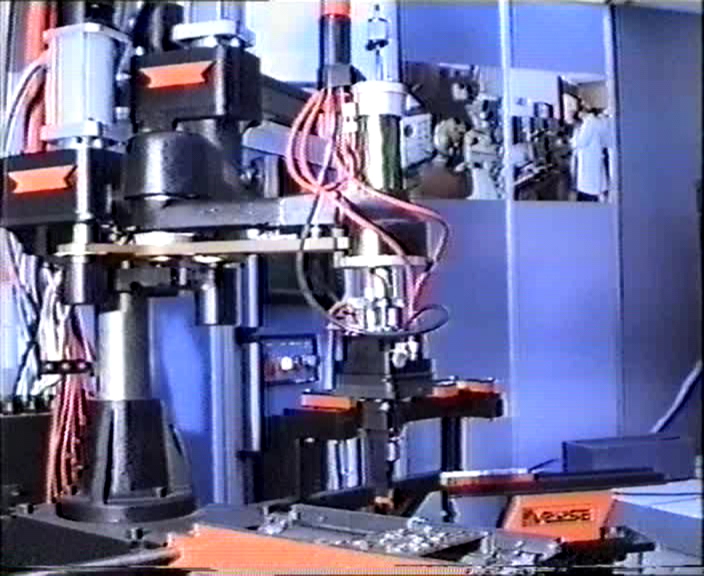
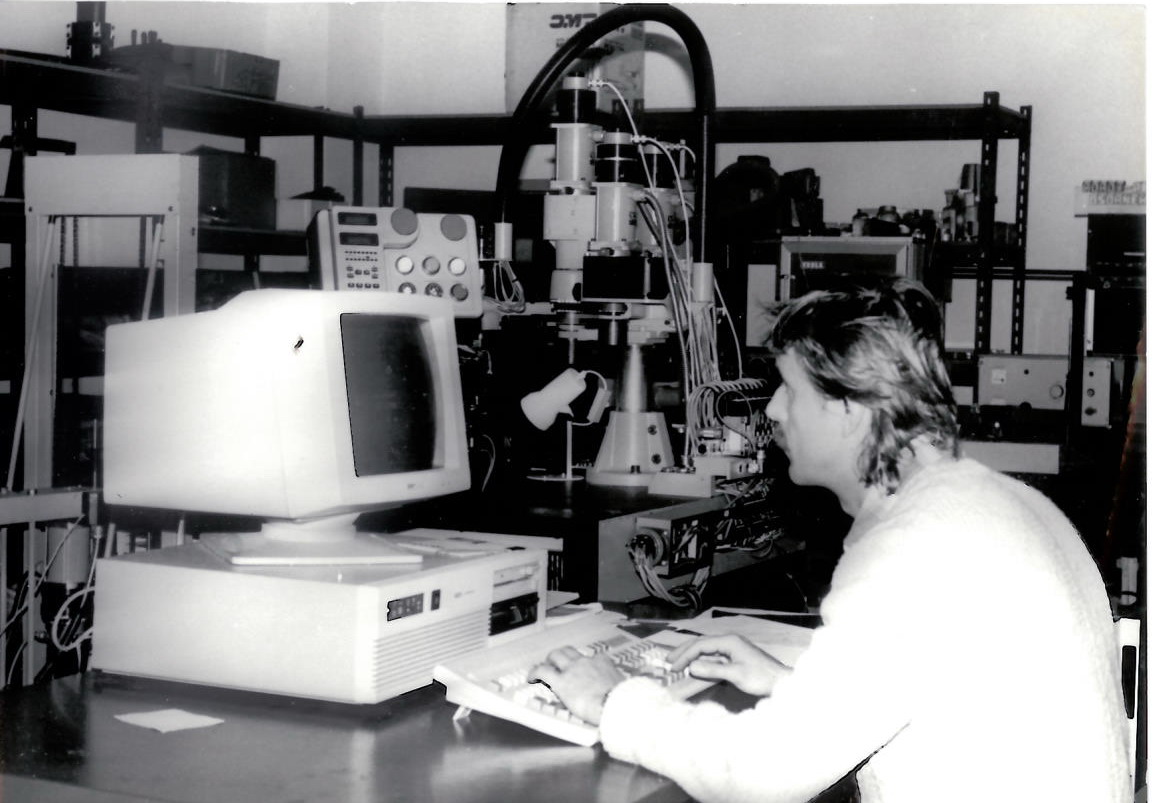
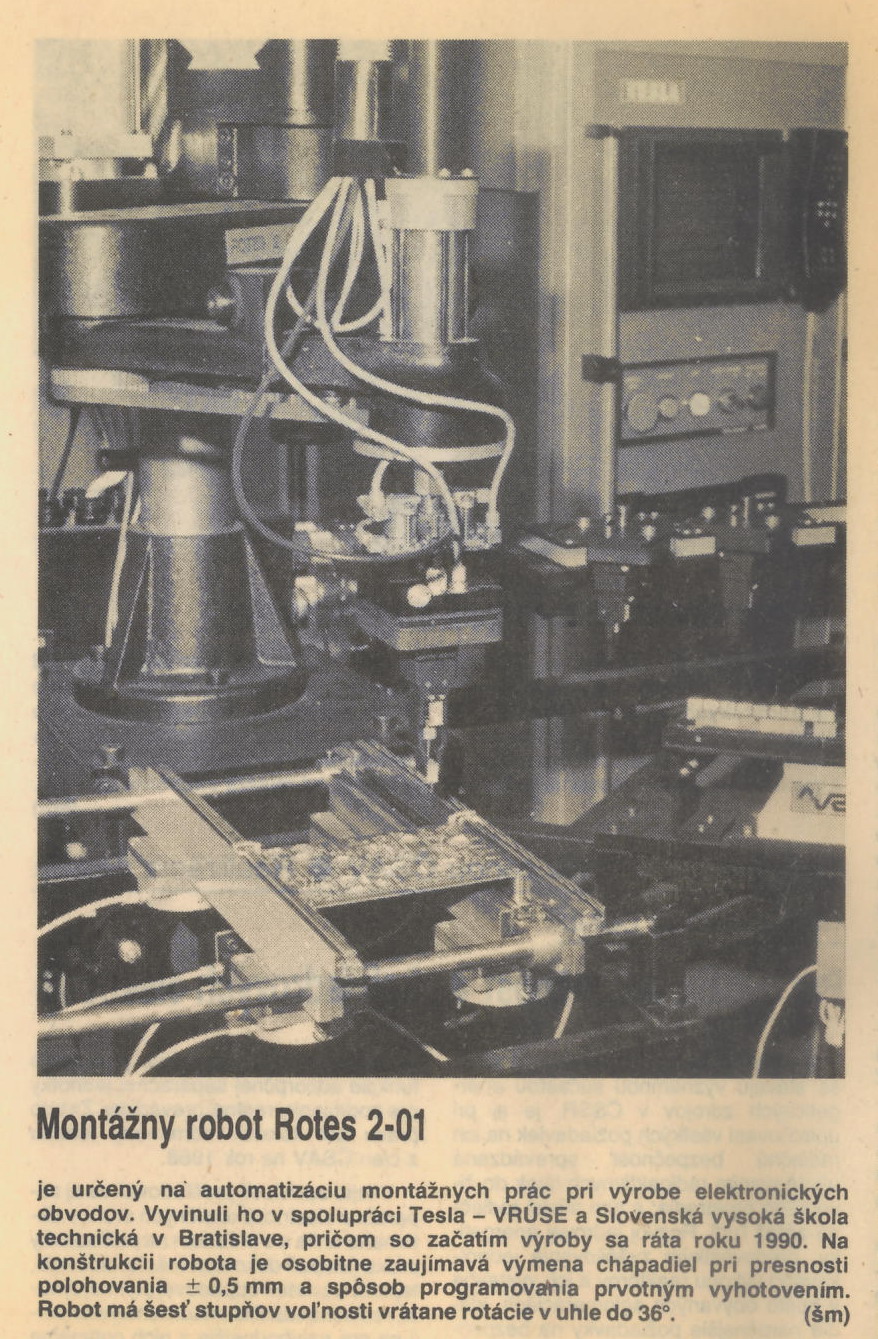
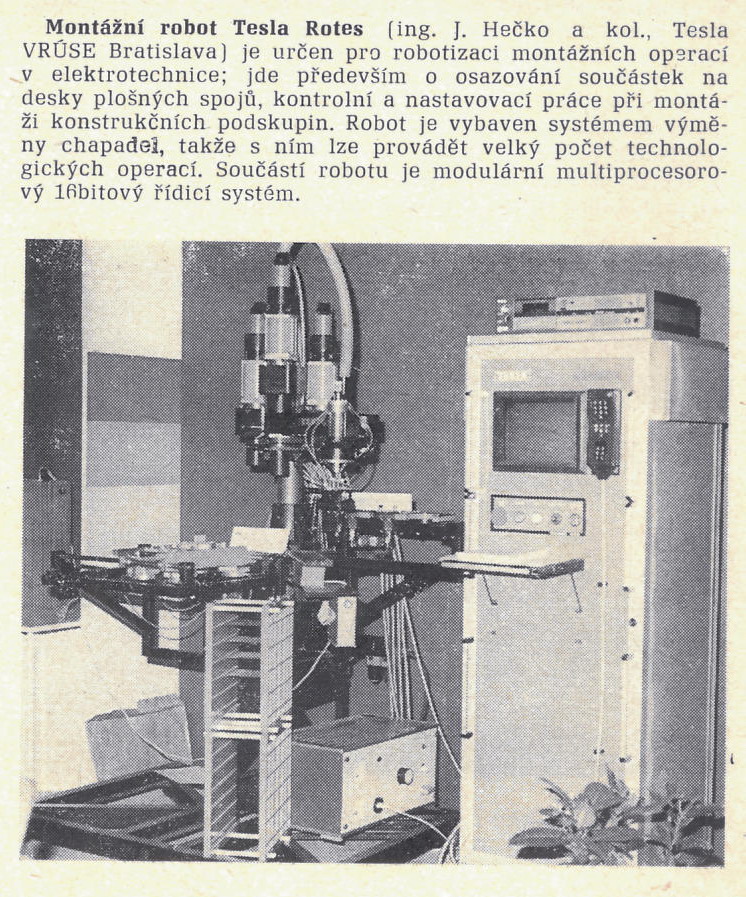
The robot was equipped by the automatic exchange of the tentacles. Such robot had the great options of the technological utilization. Tentacles were equipped also with the backward contexture that enabled the adequate reaction of the robot by the wrong grip of the component. Servosystems of the robot were drafted on the base of the steppong motors, where was the flexible bacward contexture and the positional backward ontexture. The stepping motors were able to make 200 steps during one evolve. It was possible to gain 25 microsteps. The control of the omputer was realized by the microcomputer on the base of 16 – bite microprocessor ( Intel 8086 ). The controling unit was programmed on the basis of the instructions from the keyboard, then the robot was able to make the particular trajectory. During the trajectory of the robot, the omputer sends the facts into RJ that ontain some information about the amount of the steps of the motors and speed for the particular propulsions. The control in offline schedule wsa never done. The maximal speed of the tentacle was about 2 meters per second.
Evaluations:
At the international exhibition ROBOT ´88 in Brno and also at the Days of technis ´88 was exposed as the functional model, where it belonged to the most admired exhibits of the whole exhibition. In 1990 TESLA VRUSE was abolished and the development and the prodution was stopped. Only 1 model and 2 functional types remained.
Technical parameters:
| Control: | microcomputer INTEL 8086 |
| Degree of freedom: | 3 |
| Drive: | 3x step motor MEZ Nachod |
| Memory: | CMOS |
| Speed of technological chaplet: | 2 m/s |
Developers:
doc. Ing. Peter Hubinský, PhD., CSc., Ing. Stanislav Almássy, CSc., Ing. Pavol Sivíček, CSc., Ing. Alexander Varga, Ing. Milan Plechlo
Gallery:
| |
 |
 |
 |
 |
 |