Trunk

History:
In 1987 – 1992 there was a project called CHOBOT that has a wide range of movement. Robot was drafted mainly on spraying processes and on the other proper tasks as for examlpe in the car industry, etc.
Utilization:
Spraying processes in industry, for example into the hard accessible parts of the constructions and shapes of the spraying cell.
Construction and control:
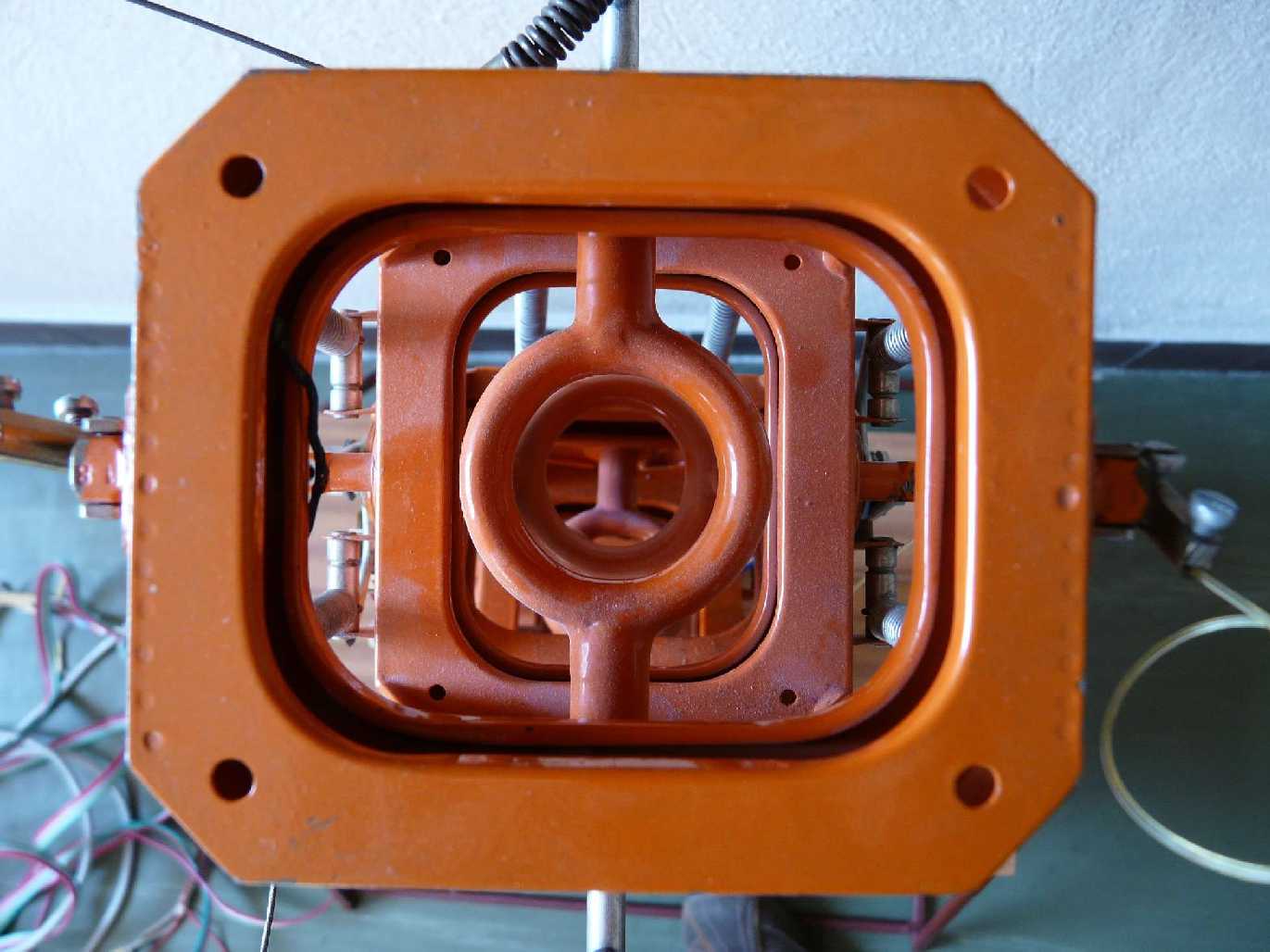
Robot that was established on KAR was built from many parts and each part was controled. The structure of the robot was created by the columns of the ovoids, membranous discs, that are centred with the flexible middle switch. The whole olumn of the ovoids is positional shaped with the pull of four circumferential tubes. Tubes are situated to the upper ovoid. We can lead the robot with winding of the ropes that are situated in the tubes. It is needful to lead four tubes by middle holes in the ovoids. This proess is ommon by the usage of the robot for the spraying processes. Three tubes serve for the leading of the colour and one tube serve for the leading of the pressure air. The basic kinematic structure was led by the tensile and positional servosystems with the flexible structure.
Developers:
prof. Ing. Václav Kalaš, DrSc., Ing. Vladimír Zemánek
Gallery:
| |
 |
 |
 |