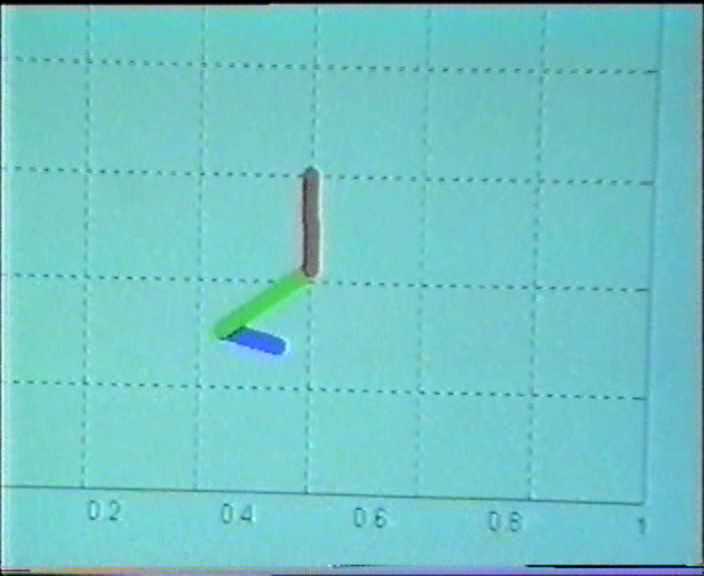
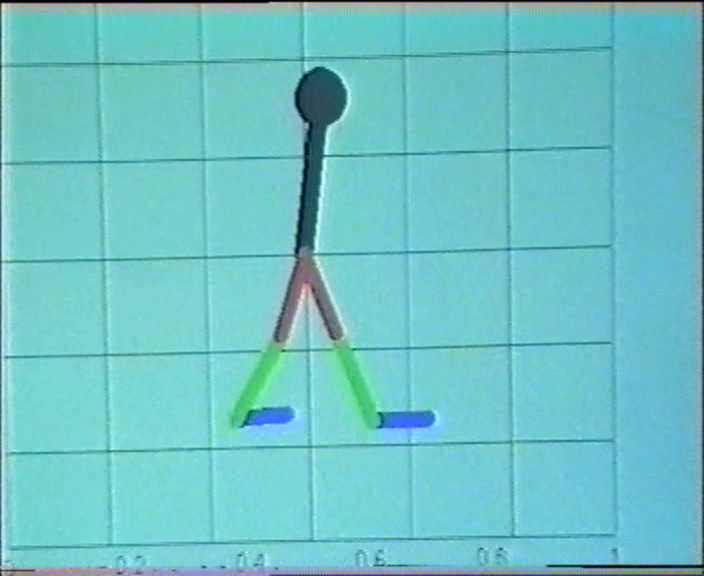
Model of three section leg
One of the other studies, that KAR was dealing with in 2001 and 2002 was study of dynamic system of moving robot – dealt by Ing. Ján Kardoš, PhD. Project was realised with the cooperation of english university Of Electrical and Electronic Engineering, University of Portsmouth, UK.
Difficult algorithm was applied on the movement coordination – three section leg , that represents human leg model - ankle, knee and hip joint. Study presents non-linear regulator that creates almost optimal time response and it‘s resistent to external defects and parameter uncertainity in system model. The operating model was developed for SISO servosystems.
Gallery:
 |
 |