Model trojčlánkovej nohy
Jednou z ďalších štúdii, ktorou sa na KAR v rokoch 2001 a 2002 zaoberal Ing. Ján Kardoš, PhD. bola štúdia dynamických systémov kráčajúceho robota. Projekt sa robil v spolupráci s anglickou univerzitou: Dept. Of Electrical and Electronic Engineering, University of Portsmouth, UK.
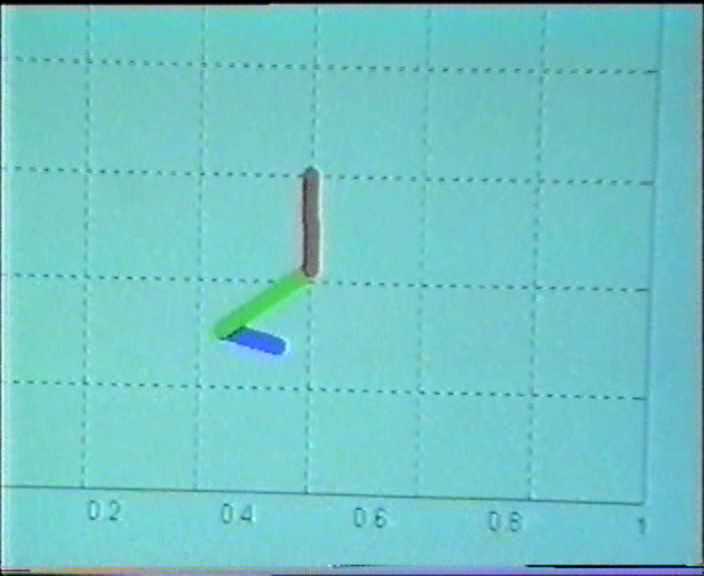
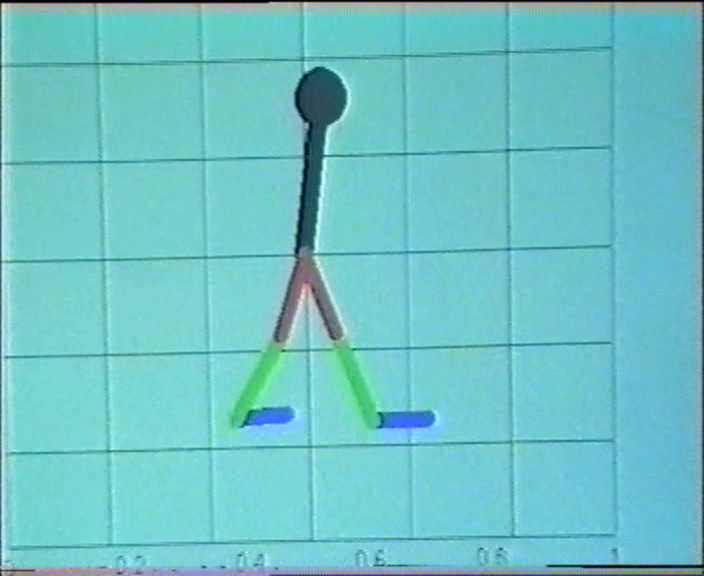
Veľmi zložitý algoritmus, ktorý bol vypočítaný sa aplikoval na riadenie pohybu trojčlánkovej nohy, čo predstavovalo model ľudskej nohy: bedrový kĺb, kolenný kĺb a členkový kĺb. Na obrázku vľavo sú vidieť jednotlivé časti modelu.
Štúdia predstavuje je nelineárny regulátor, ktorý vytvára takmer časovo optimálnu odozvu a je odolný pre externé poruchy a neistoty parametrov v modely systému. Model ovládania bol vyvinutý pre SISO servosystémy.
Galéria:
 |
 |