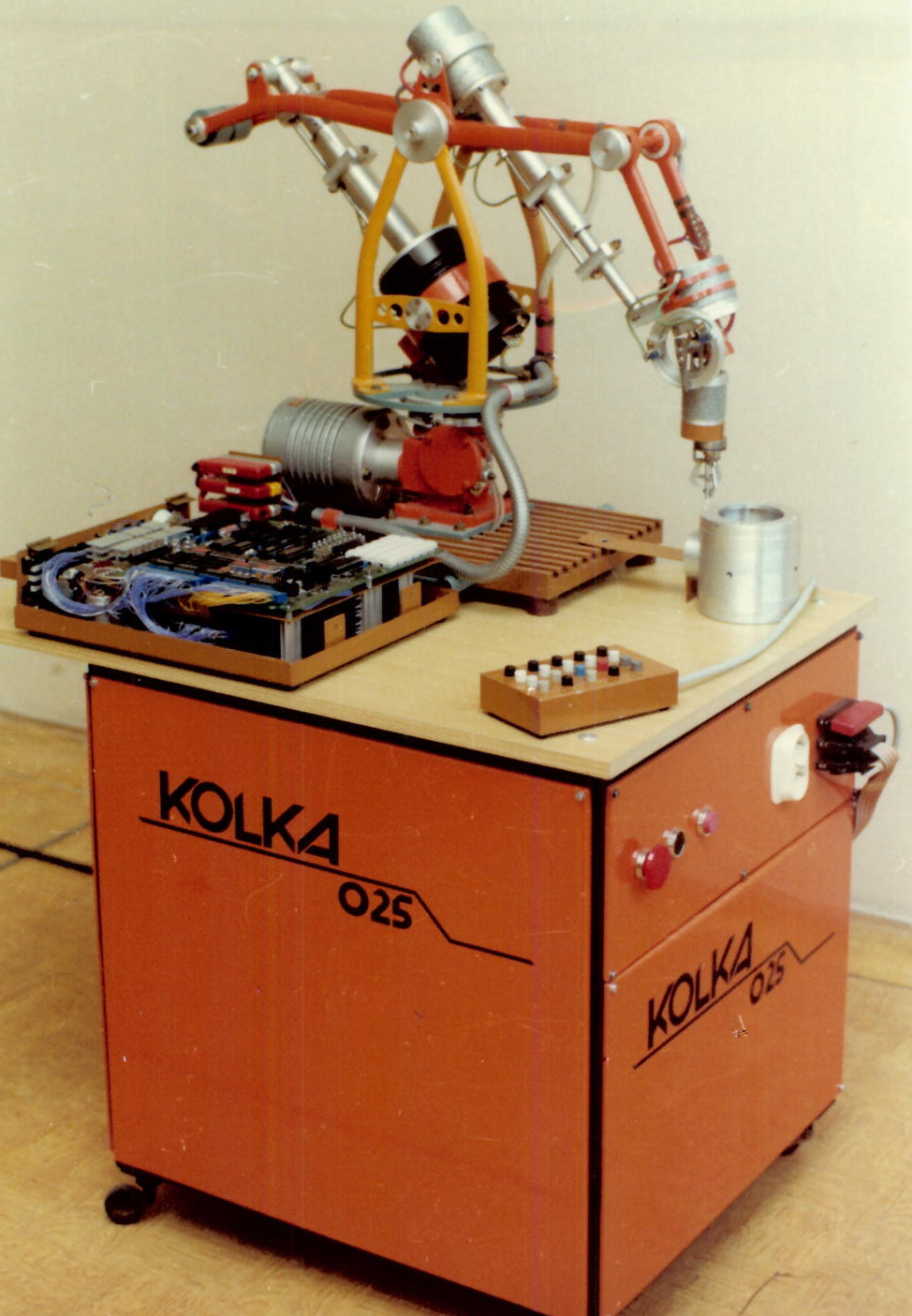
KOLKA 025
History:
In 1978 at the Department of automation and control of the Electrotechnical
Department SVST in Bratislava ( today Department of Electrotechnics and Informatics STU ) started up the first idea to make for the necessity of the tuition the robotic system KOLKA, that would enable the laboratory tuition especially from the view of the robotic work of the welding processes, as well as the processes of the superficial modification. By the synthesis of this robotic system it was very important to have the requirement with the high punctuality of the coordination of the mutual movements of the kinematical pair.
Utilization:
Robot KOLKA 025 was intended mainly for the laboratory and pedagogical purposes, verification of the algorithms, planning and programming of the movements, especially because of the simulation of the robotic work of the welding processes during which time a pencil that was grasped in the tentacle could draw on the particular paper its partially besides the space way and it could also control it with its scheduled mathematical model.There was also the next possibility to apply it by the automation of the real assembling works and it could be done as the mechanical type or as the electronical type.
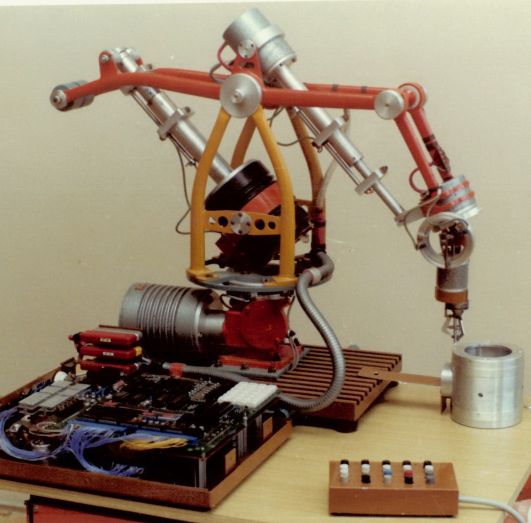
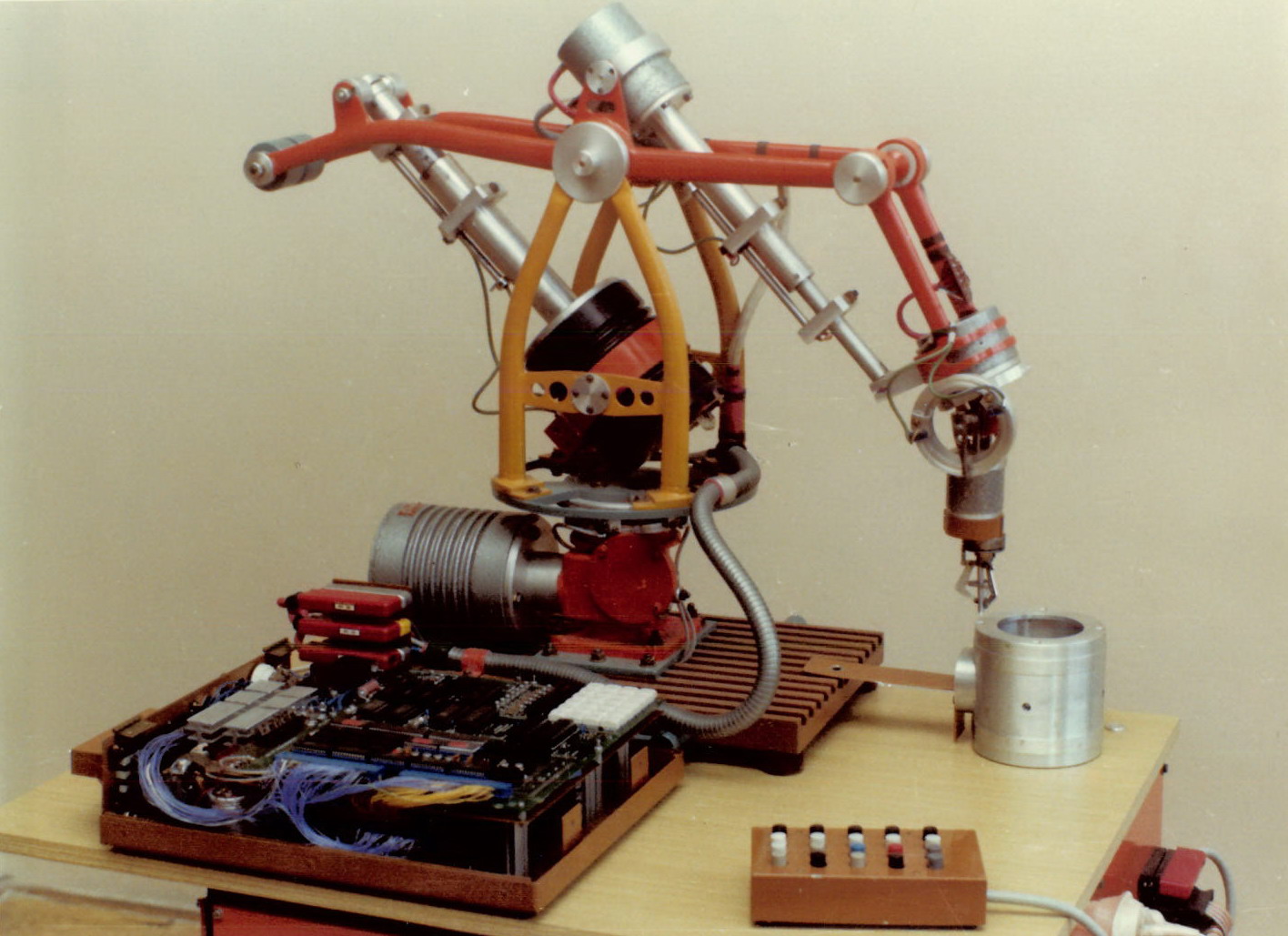
Construction and control:
The mechanic part of the robot was made from the thin – walled steel profiles with the high toughness. The robot disposes with five degrees of disposal and with the electromagnetic used technological chaplet with the possibility to set up the power of clamping as the change of the details in the certain measure.
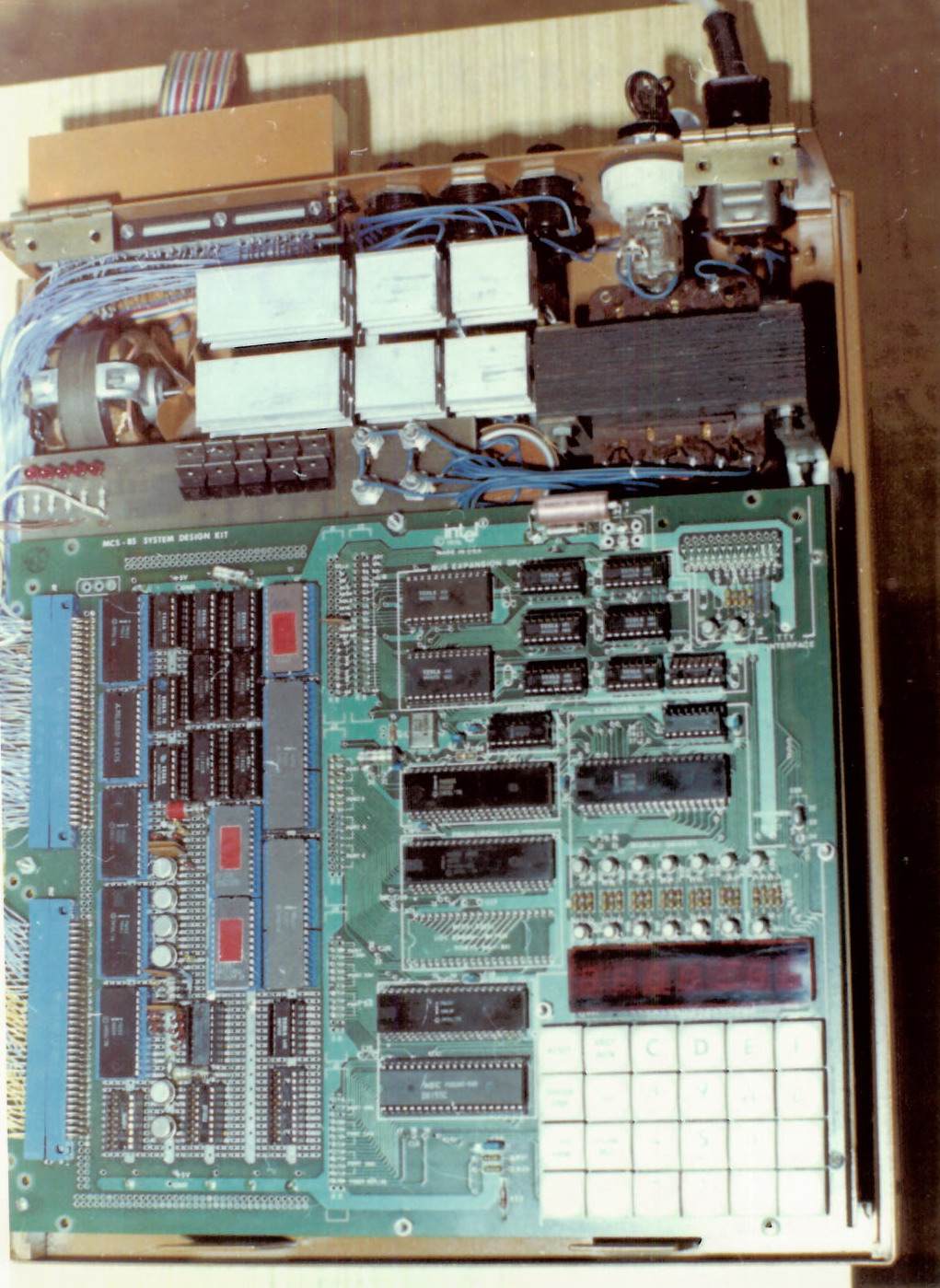
Each of the degrees of disposal has two layer adjustable microswitches that are the part of the protection of the whole system. The servosystems of the robot are offset by the stepping motors MEZ. The The robot was drafted for two types of the control thank to the operative computer RPP – 16S and also thank to the microcopmuter on the base 8 – bite microprocessor ( Intel 8085 ). The ontroling programme alone contain 3 kB of the memory during which time the control of the particular stepping motors is performed through the timers Intel 8253. Tho controling unit enabled to „learn“ the robot to perform the required trajetory. By learning there are some generated signals because of the signals from the keyboard. Such signals are generated into the controling and power zones of the robot and then it is initiated into the movement in the particular direction. By performing the learnt trajectory of the robot, the computer sends some facts into RJ that contains the information about the amount of the steps of the motors and also the facts about the speed for the particular propulsions. The movement programmes of the robot that are learnt can be removed from the operation memory of the computer to the floppy disk. The system was drafted in a way that it is possible to fill up it in the case of need also through the next degrees of disposal.
Evaluations:
At the intenational exhibition called ROBOT “ 82 in Brno that took place on 17. – 23.2.1982. The system KOLKA 025 with the microprocessor control was introduced there. This system received the Honourable mention there. It was the highest evaluation of the exhibit from the nonproductive sphere.
Technical parameters:
| Control: | microcomputer INTEL 8045 |
| Degree of freedom: | 5 |
| Drive: | 5 x step motor MEZ Nachod |
| Memory: | EPROM 2758,3 k byte |
| Speed of technological chaplet: | 0,5 m/s |
| Precision positioning: | +/- 0,5 mm |
| Weight: | 55 kg |
| Tonnage: | 250 g |
Conclusion:
Production of the robotic system KOLKA 025 has an important influence on the establishment of the study sight ROBOTIKA within the study department Technical cybernetics at the Department of automation and regulation EF SVST, where it was used during the laboratory exercices. On the base of the system KOLKA 025 there was made 6 patents.
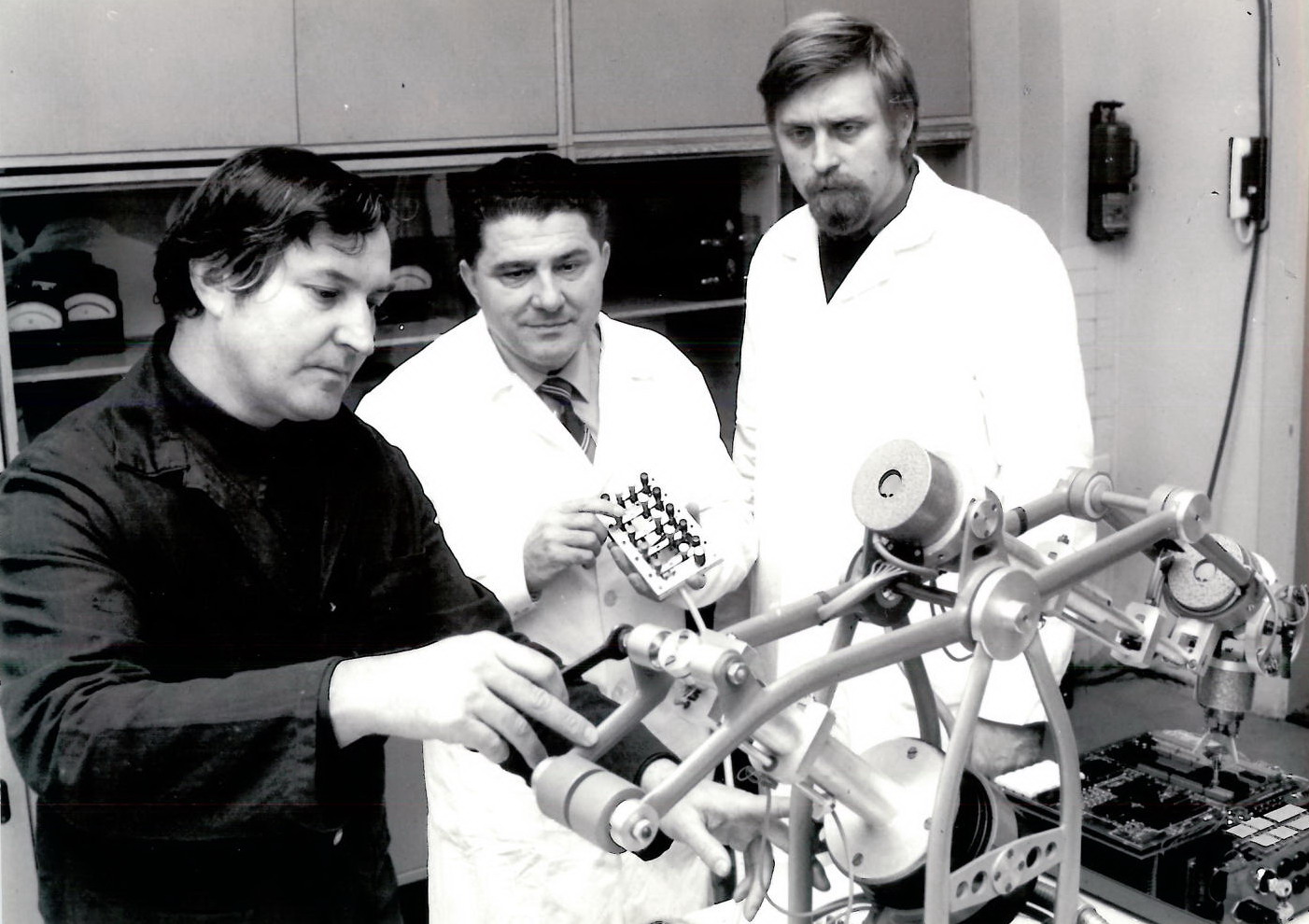
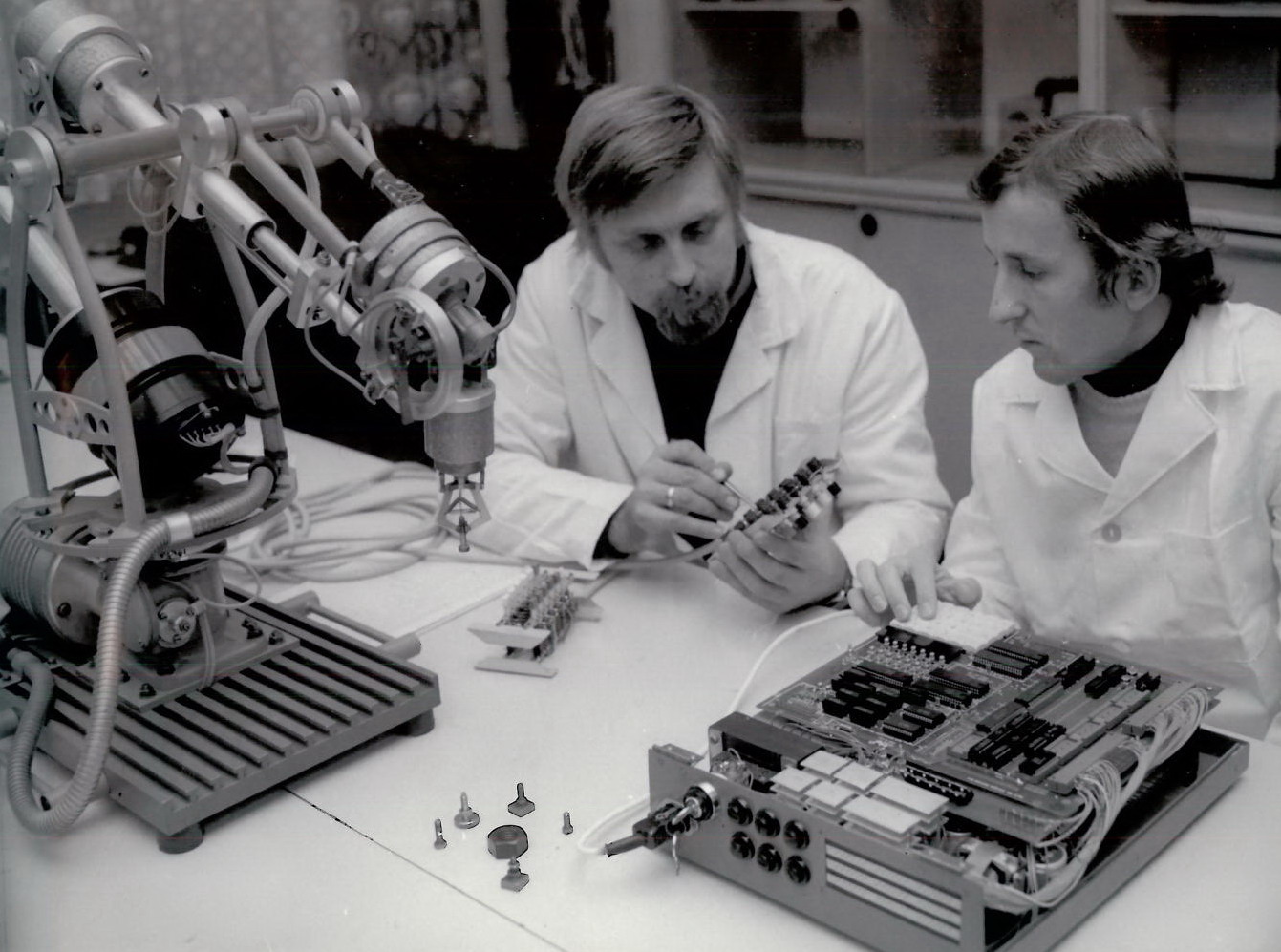
Developers:
prof. Ing. Václav Kalaš, DrSc., doc. Ing. Ladislav Jurišica, CSc., Ing. Stanislav Almássy, CSc., Ing. Pavol Sivíček, CSc., Ing. Alexander Varga, CSc., Ing. Juraj Šurka, CSc., Ing. Milan Žalman, CSc. a Jaroslav Máder
Gallery:
 |
 |
 |
 |
 |
 |