KOLKA 025
História:
V roku 1978 na Katedre automatizácie a regulácie Elektrotechnickej fakulty SVŠT v Bratislave (dnes Fakulta Elektrotechniky a informatiky STU) vznikla prvá myšlienka zhotoviť pre potreby výuky robotický systém KOLKA (kolektív Kalaš), ktorý by umožňoval laboratórnu výuku najmä z hľadiska robotizácie zvarovacích procesov, montážnych procesov, ako aj procesov povrchových úprav. Pri syntéze uvedeného robotického systému sa vychádzalo z požiadavky vysokej presnosti koordinácie vzájomných pohybov kynematických dvojíc.
Využitie:
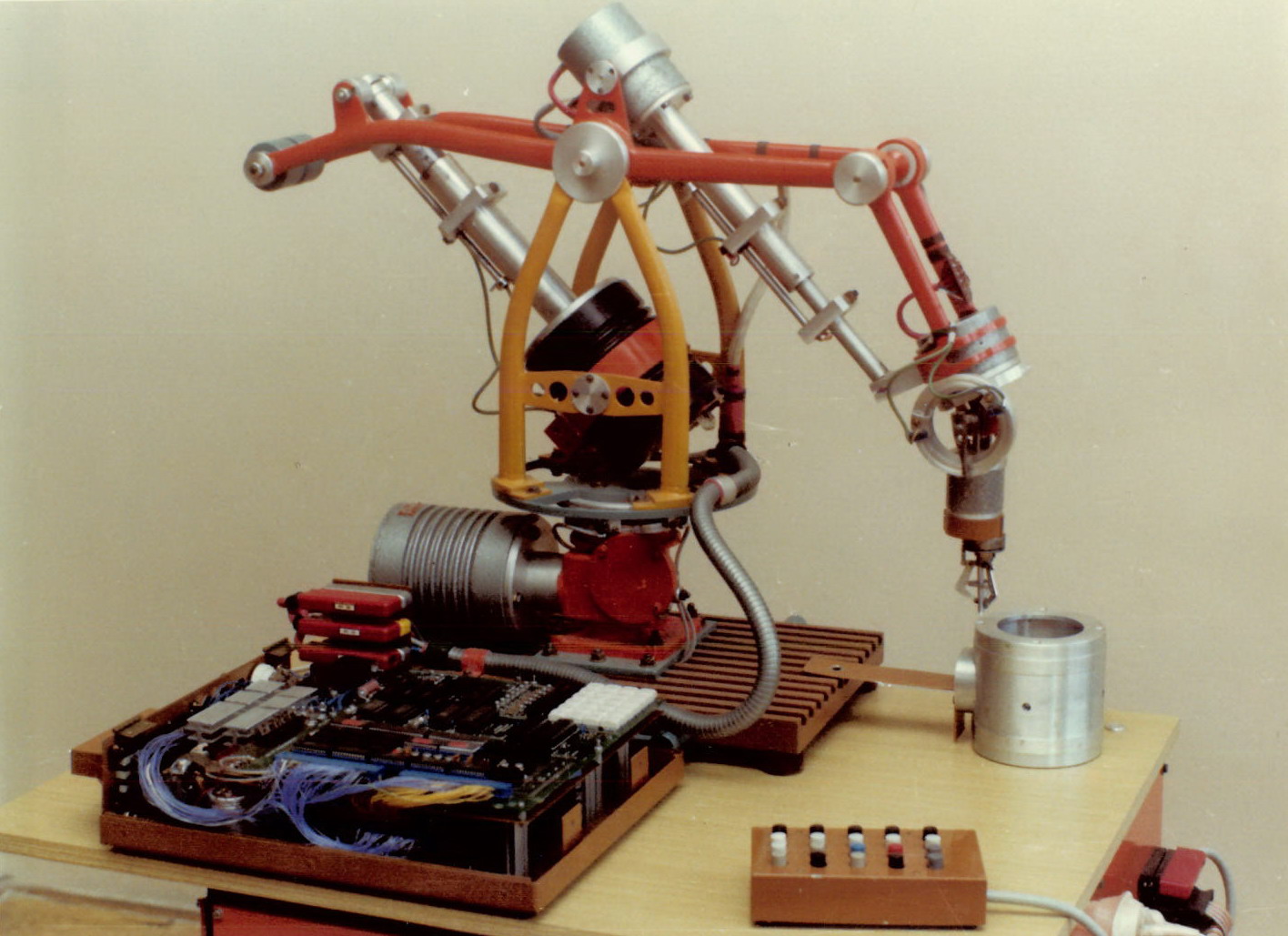
Robot KOLKA 025 bol určený hlavne na laboratórne a pedagogické účely, overovanie algoritmov, plánovanie a programovanie pohybov, najmä na simuláciu robotizácie zvarovacích procesov, pričom ceruzka uchopená v chápadle mohla kresliť na príslušný papier svoju čiastočne aj priestorovú dráhu a kontrolovať ju s jej naprogramovaným matematickým modelom.
Ďalej bolo možné ho aplikovať pri automatizácií reálnych montážnych prác a to ako mechanického typu, tak aj elektronického typu.
Konštrukcia a riadenie:
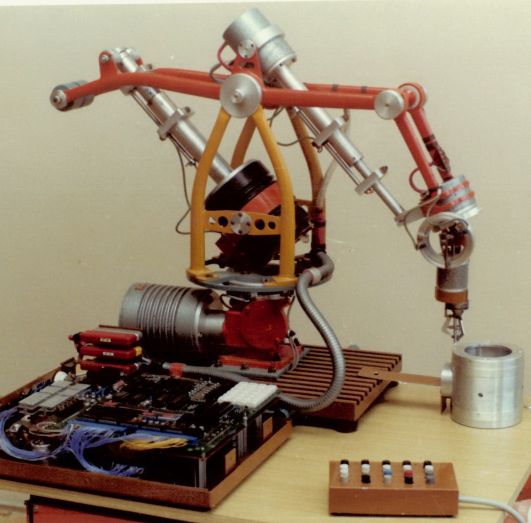
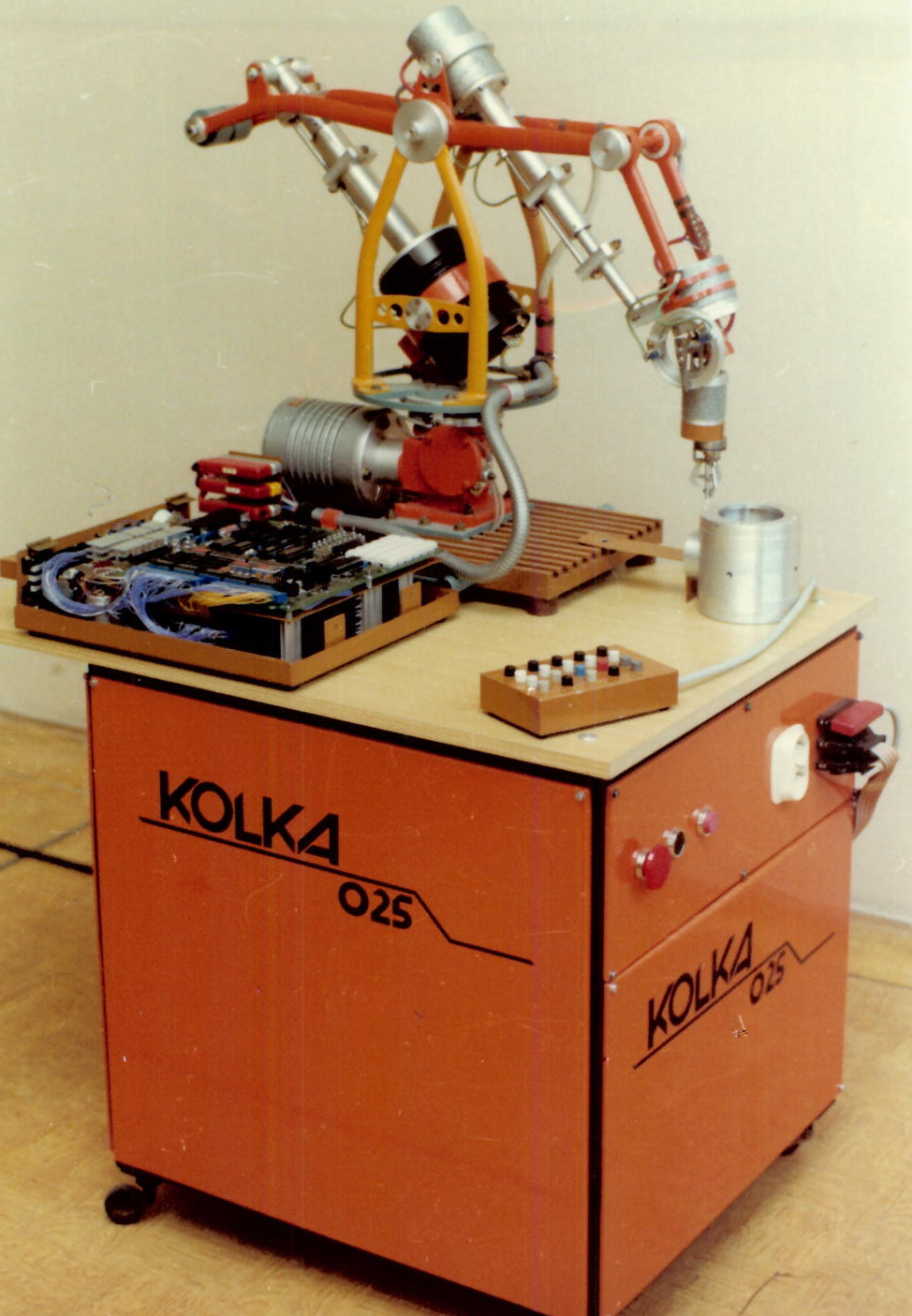
Mechanická časť robota bola zhotovená z tenkostenných oceľových profilov s vysokou tuhosťou.
Robot disponuje s 5 stupňami voľnosti a s elektromagneticky ovládanou technologickou hlavicou s možnosťou nastavenia zvieracej sily ako aj premenu uchopovaných detailov v určitom rozsahu.
Každý zo stupňov voľnosti má použité dva polohové nastaviteľné mikrospínače, ktoré tvoria ochranu systému. Servosystémy robota sú osadené krokovými motormi MEZ Náchod reakčného typu, pritom možno použiť drobenie kroku, čo môže ďalej zlepšovať presnosť systému a potlačuje rezonančné zóny.
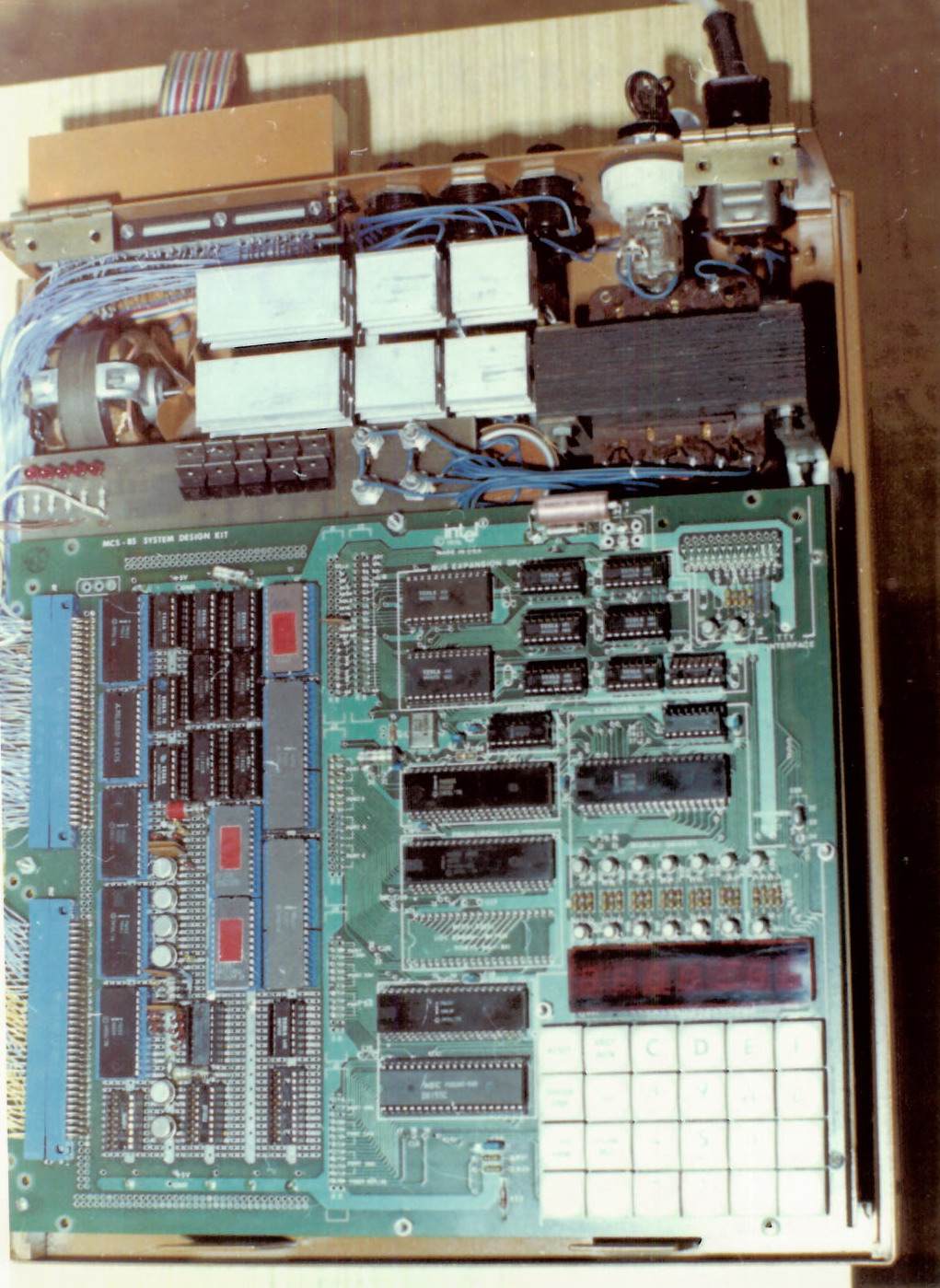
Robot bol koncipovaný pre dva druhy riadenia pomocou riadiaceho počítača RPP-16S a pomocou mikropočítača na báze 8-bitového mikroprocesora (Intel 8085).
Samotný riadiaci program zaberá 3 kB pamäte, pričom riadenie jednotlivých krokových motorov sa uskutočňuje cez časovače Intel 8253.
Riadiaca jednotka umožňovala „naučiť“ (na základe povelov z klávesnice) robot vykonávať požadovanú trajektóriu.
Pri učení sú na základe signálov z klávesnice generované signály do riadiacich a výkonových obvodov robota a tým je uvedený do pohybu v požadovanom smere príslušný pohon. Pri vykonávaní naučenej trajektórie robota, počítač vysiela do RJ údaje obsahujúce informácie o počte krokov motorov a rýchlostiach pre jednotlivé pohony. Naučené pohybové programy robota je možné premiestniť z operačnej pamäti počítača na magnetický disk (disketa).
Systém bol koncipovaný tak, že ho bolo možné doplniť v prípade potreby aj ďaľšími stupňami voľnosti.
Ocenenia:
Na medzinárodnej výstave ROBOT ’82 v Brne v dňoch 17.-23.2.1982, kde bol systém KOLKA 025 s mikroprocesorovým riadením vystavený a predvádzaný, obdržal od medzinárodnej poroty Čestné uznanie, čo bolo najvyššie možné ocenenie exponátu z nevýrobnej sféry. Taktiež v roku 1982 obrdžal kolektív tvorcov cenu ministra školstva za tento robotický systém.
Technické parametre:
| Riadenie: | mikropočítač INTEL 8045 |
| Stupne voľnosti: | 5 |
| Pohon: | 5 x krokový motor MEZ Nachod |
| Pamäť robota: | EPROM 2758,3 k byte |
| Speed of technological chaplet: | 0,5 m/s |
| Precision positioning: | +/- 0,5 mm |
| Weight: | 55 kg |
| Tonnage: | 250 g |
Conclusion:
Production of the robotic system KOLKA 025 has an important influence on the establishment of the study sight ROBOTIKA within the study department Technical cybernetics at the Department of automation and regulation EF SVST, where it was used during the laboratory exercices. On the base of the system KOLKA 025 there was made 6 patents.
Developers:
prof. Ing. Václav Kalaš, DrSc., doc. Ing. Ladislav Jurišica, CSc., Ing. Stanislav Almássy, CSc., Ing. Pavol Sivíček, CSc., Ing. Alexander Varga, CSc., Ing. Juraj Šurka, CSc., Ing. Milan Žalman, CSc. a Jaroslav Máder
Gallery:
 |
 |
 |
 |
 |
 |