Chobot

História:
V rokoch 1987 až 1992 bol na KAR realizovaný projekt s názvom Chobot, ktorý mal veľký rozsah pohybu. Robot bol koncipovaný predovšetkým na striekacie procesy a na iné vhodné práce, napríklad v automobilovom priemysle a pod.
Využitie:
Na striekacie procesy v priemysle, napr. do ťažko prístupných častí konštrukcií a tvarov striekaného telesa.
Konštrukcia a riadenie:
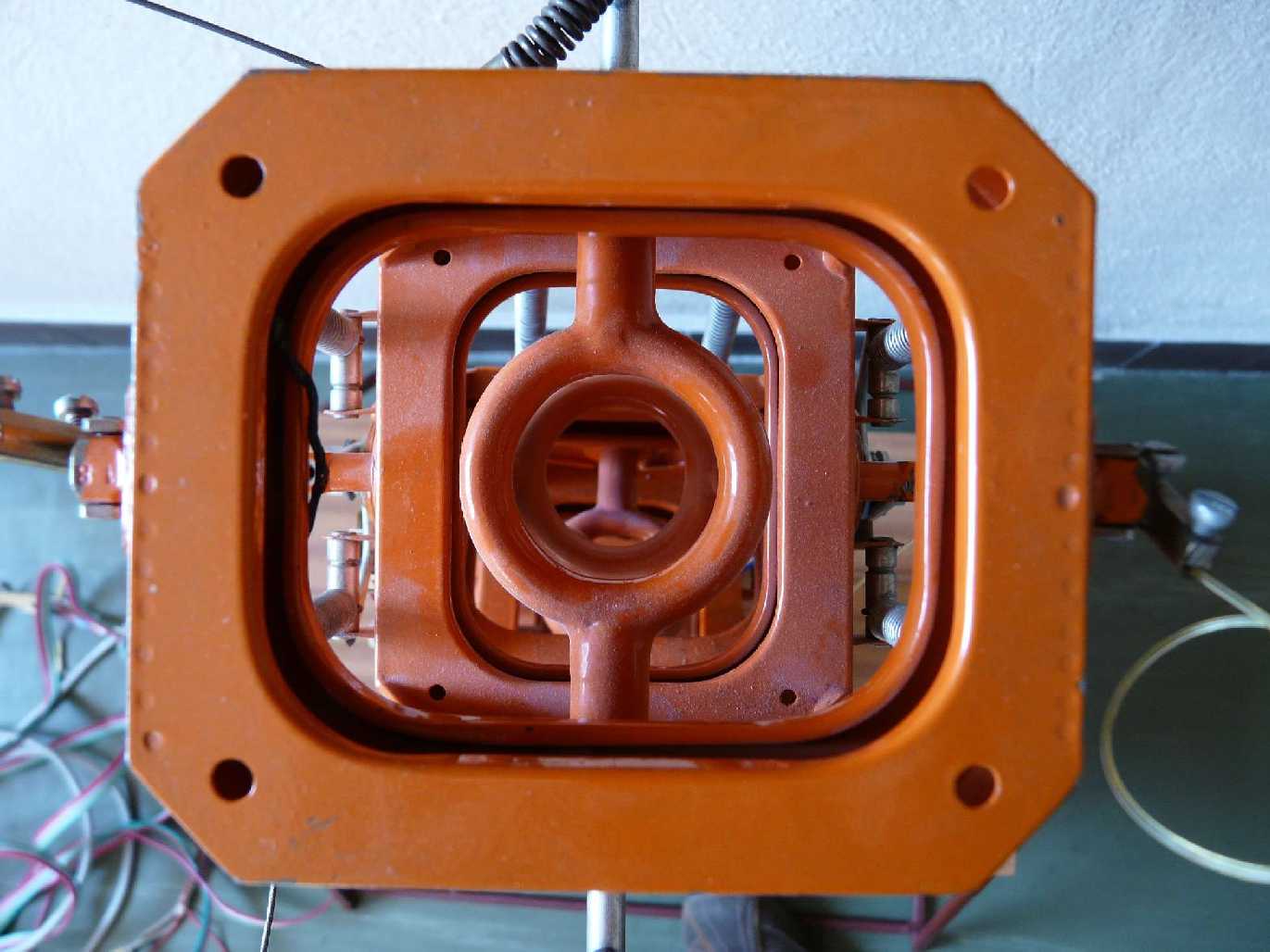
Robot, ktorý vznikol na KAR, bol postavený z niekoľkých častí a každá časť bola svojím spôsobom ovládaná. Štruktúra robota bola vytvorená pomocou stĺpcov ovoidov, membránových diskov, ktoré sú centrované pružným stredovým prútom. Celý stĺpec ovoidov je polohove tvarovaný pomocov ťahu štyroch obvodových bovdenov. Bovdeny sú zakotvené do vrchného ovoidu. Minimálne dve takéto ramená ovoidov radené za sebou s tzv. lakťovým kĺbom,
umožnujú získať robota až so siedmymi stupňami voľnosti. Robota je možné ovládať pomocou navínania laniek, ktoré sú umiestnené v bovdenoch.
Pri využití robota pre striekacie procesy, by bolo potrebné stredovými otvormi v ovoidoch viesť štyri hadice. Tri hadice by slúžili pre prívod farby a jedna by bola využitá pre prívod tlakového vzduchu. Základná kynematická štruktúra bola riadená ťahovými resp. polohovými servosystémami s premenlivou štruktúrou. Nad ňou cez laketný kĺb by bola ovládaná druhá kynematická časť, zakončená eletrickou prepínaciou striekaciou pištoľou.
Na vývoji sa podielali:
prof. Ing. Václav Kalaš, DrSc., Ing. Vladimír Zemánek
Galéria:
| |
 |
 |
 |