Fluidný senzorický systém priemyselného robota
Ďalší rozvoj automatizácie a robotizácie v osemdesiatych rokoch minulého storočia, ako aj zvýšenia kvality a produktivity v technológiách oblúkového zvárania sa nezaobišiel bez riešenia polohovej adaptivity týchto systémov. Cieľom štúdie na KAR STU bolo poukázať na možnosti možnosti realizácie riadiaceho systému s polohovou spätnou väzbou jednoduchými prostriedkami.
Technologickým požiadavkám na snímanie informácie o polohe horáka vzhľadom na zvar vyhovoval fluidný reflexný snímač vzdialenosti (FRSV), ktorý bol vyrábaný planárnou technikou odlievaním z epoxidovej živice alebo elektroiskrovým obrábaním z kovu, prípadne z iných materiálov. Jeho charakteristickou črtou bola nízka výrobná cena, miniatúrnosť, vysoká presnosť, veľká citlivosť, spoľahlivosť, nenáročná údržba a pod. Fluidné snímače polohy sú ako výsledok výskumu a vývoja mnohých prototypov. Jeho určenie bolo napr. pre zvárací robot OJ 10, jedná sa o operačné modulárne pracovisko, určené pre oblúkové zváranie v ochrannej atmosfére plynov (Ar+CO2).
Popis činnosti FRSV:
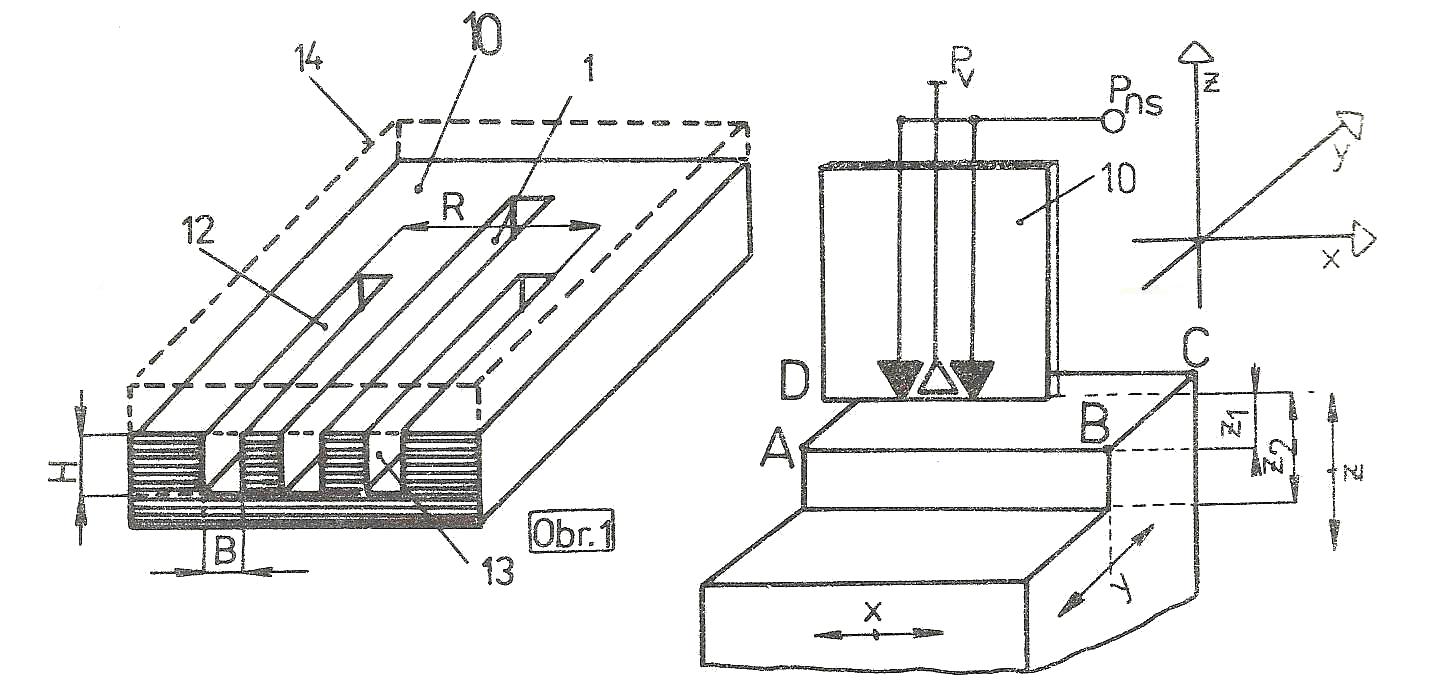
FRSV pozostáva z dvojice napájacích kanálov 12 a 13, medzi nimi umiesteného prijímacieho (výstupného) kanála 11 s pravouhlými prietočnými prierezmi a čiarkovane naznačenej krycej dosky 14 s vývodmi, ktorá uzatvára priestory prúdenia pracovného plynu. Snímač rieši základnú úlohu merania relatívnej kolmej vzdialenosti (rádove mm) medzi referenčnou rovinou merania, funkčne spojenou so zvoleným súradnicovým systémom a okamžitou rovinou merania, funkčne viazanou so snímačom, umiestneným na technologickej hlavici robota ako aj odvodené úlohy, ktoré na bezdotykové meranie vzdialenosti transformovať.
Zhrnutie:
Hlavnou predpokladanou a experimentálne overenou oblasťou je použitie v riadiacich obvodoch adaptívnej korekcie mikropribližovania polohovacích systémov priemyselných robotov pri automatickom vedení zváracej hubice pri elektrickom oblúkovom zváraní v ochrannej atmosfére.
Na vývoji sa podielali:
Ing. Peter Drahoš, PhD. , Doc. Ing. Ján Šturcel, PhD.