Myšobot

Utilization:
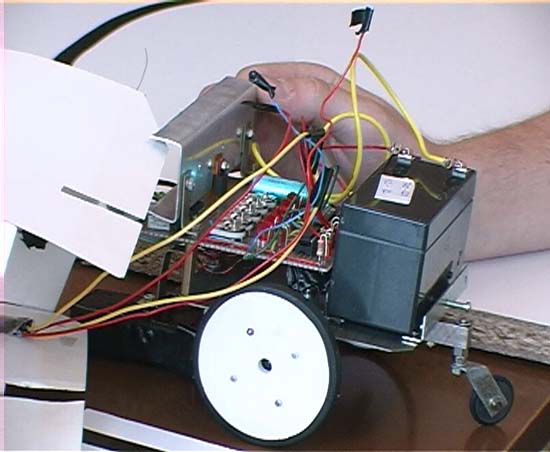
MYŠ-O-BOT is simple mobile robot, that is able to follow the line. It’s usage is mainly educational.
Construction and control:
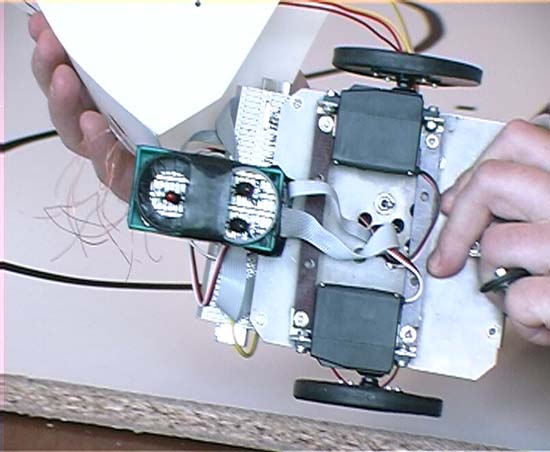
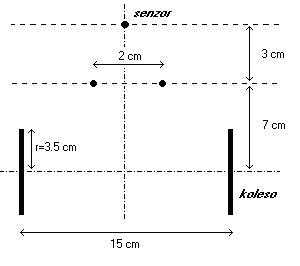
Regulation is realised with the usage of single chip micro computer AT89C2051. Program for regulation was created in th C language in Ride. It uses one timer working v 16 bit mode to generate operating impulses for drive units.According to the sensor status, the speed of motor rotation is specified. For robot drive, two servomotors are used . Robot has 5 light-sensible sensors, but present version of program uses only 3. To reduce perturbing influence of the light, they are kept in the small boxes.
Sensor consists of LED diode and electrooptical transistor.Electrooptical transistor reacts on the intensity of reflected light from LED diode. His output is connected to the operating amplifier working as a ako comparator. If the white area is under the sensor, it reflects the light of LED diode well and transistor is opened. When the sensor moves to the black line, the transistor shuts and the output of comparator will flip. It is possible to tu set up the sensitivity for every single with trimer that is located on the printed circuit board.
Technical parameters:
| Speed: | 22 cm/s |
| Control: | Microcomputer AT89C2051 |
| Programming language: | C |
| Sensors: | 5 light sensitive sensors |
Developers:
M.Gargalovič, R.Kinder, M.Čerňanský, R.Tesár, M.Malý
Galéria:
 |
 |
 |
 |