Myšobot

Využitie:
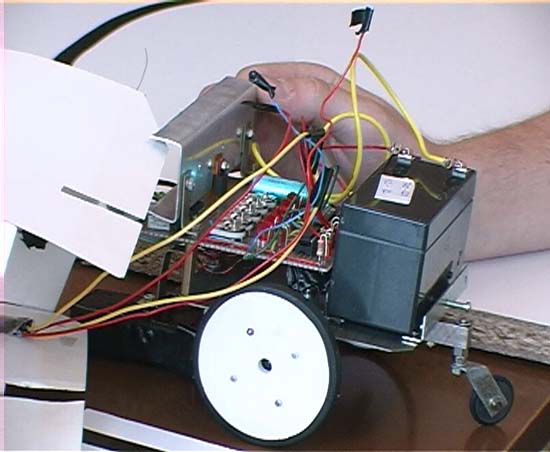
MYŠ-O-BOT je jednoduchý mobilný robot schopný sledovať čiaru. Jeho využitie je hlavne na pedagogické účely.
Konštrukcia a riadenie:
Riadenie je realizované prostredníctvom jednočipového mikropočítača AT89C2051. Program na riadenie bol vytvorený v jazyku C v prostredí Ride. Využíva jeden časovač pracujúci v 16 bitovom režime na generovanie riadiacich impulzov pre servomotory. Podľa stavu senzorov sa pomocou jednoduchého algoritmu určujú rýchlosti otáčania motorov.
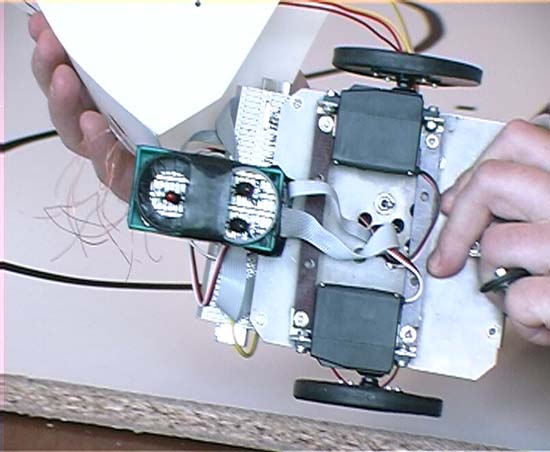
Na pohon robota slúžia dva upravené servomotory. Natočenie pôvodných polohových sérv bolo ovládané šírkou impulzov. Úprava spočívala v nahradení potenciometra reagujúceho na aktuálne natočenie serva pevnými odpormi. Servomotory sa teda môžu pohybovať kontinuálne a šírka riadiacich impulzov určuje rýchlosť otáčania. Servá očakávajú riadiaci impulz približne každých 20 ms. Šírka riadiaceho impulzu sa pohybuje približne od 1 ms (max. dozadu), 1.5 ms (servo stojí) po 2 ms (max. dopredu).
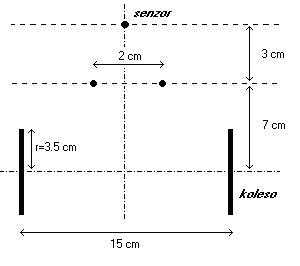
Robot má 5 svetlocitlivých snímačov, ale súčasná verzia programu využíva iba 3 snímače. Aby sa obmedzil rušivý vplyv okolitého svetla, sú umiestnené v puzdrách od kinofilmov.
Snímač pozostáva z LED diódy a fototranzistora. Fototranzistor reaguje na intenzitu odrazeného svetla z LED diódy. Jeho výstup je pripojený na operačný zosilňovač pracujúci ako komparátor. Ak sa pod snímačom nachádza biela plocha dobre odrážajúca svetlo LED diódy, tranzistor je otvorený. Keď snímač prejde na čiernu čiaru, tranzistor sa uzavrie a výstup komparátora sa preklopí. Pre každý snímač je možné nastaviť jeho citlivosť trimrom umiestnenom na doske plošného spoja.
Technické parametre:
| Rýchlosť: | 22 cm/s |
| Riadenie: | Jednočipový mikropočítač AT89C2051 |
| Programovací jazyk: | C |
| Snímače: | 5 svetlocitlivých snímačov |
Na vývoji sa podielali:
M.Gargalovič, R.Kinder, M.Čerňanský, R.Tesár, M.Malý
Galéria:
 |
 |
 |
 |