Pneumatic manipulator PM 01
History:
The pneumatic manipulator PM 01 was created in the 80 years of the last century at the Department of automation and control at EF SVST in Bratislava. The whole pneumatic manipulator was created with originally controlling unit from the pneumatic elements of the system Dreloba. The basic requests by its projection were reliability and simplicity.
Utilization:
Laboratory manipulator with the programme controling was required on the usage in the pedagogical proccess in the area of the technical cybernetics, robotics.
Construction and control:
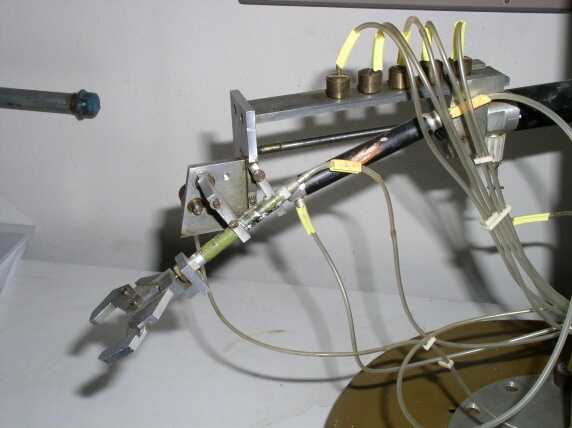
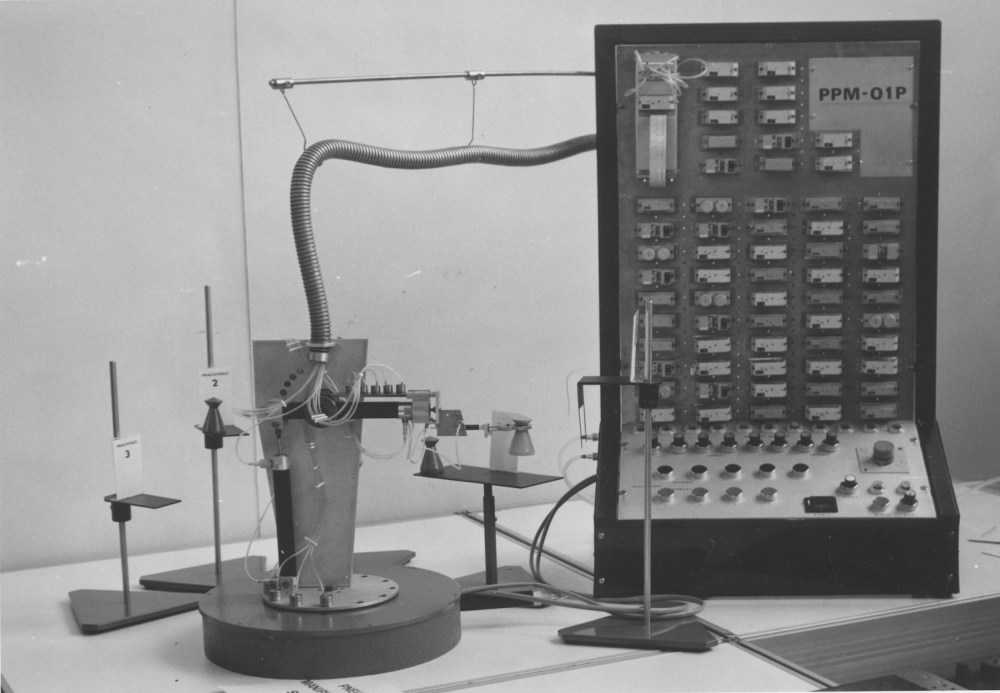
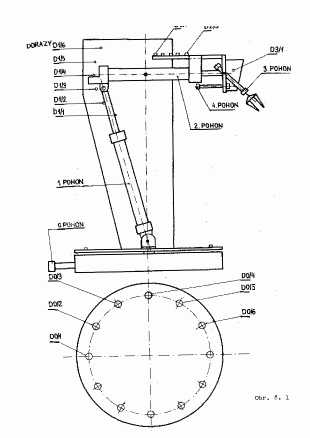
The pneumatic manipulator is schematically displayed in the gallery. Double – acting drives P0 – P3 serve on the positioning of the working arm. Drive P4 is single – acting and it serve on the gripe of the tentacle. Gap of the tentacle supplies the flexible spring that is the part of the drive P4. Manipulator works in the spheric coordinates and the working place is the spherical segment. It has 4 degrees of the disposal and its technological head can take 1 from 1344 points of the working place. All drives used on the building of the manipulator are from the pneumatic system Dreloba. There were three types of the controlling by the progressive development of the robot: pnemutic, electronic, and controlling unit.
Pneumatic control unit (1981):
It enables to control the arm either from the pneumatic scanner of the punched tape or from the controlling board. The controlling automat with the pneumatic controlling unit disposes with the strong programme that works on the base of the pneumatic elements. The control of the positioning cycle is supplied by the timing RC pneumatic elements and by two drives by the help of the feedback. Positioning cycle is quite simple but from the function point of view it has a lot of vices:
• Trajectory of tentacle is much more longer than optimal
• Difficult positioning and ordering of the instructions
• It is not solved by optimalisation of the movements of the robot
Electronic control unit (1982):
Control unit was created on the base TTL logic and transistors and they cooperate as the sequential electronical periphery. Entering signals can generate by hand or from photoelectric scanner of the punched tape.
Programmable control automat (1984):
A lot of advantages in the programming brought the usage of the school microcomputer system SMS VUVT (Zilina). This usage works on the base of the processor Intel 8080. This programme enabled the movement of many drives at the same time. The programme of the processor 8080 was created in the programming language asembler.
Technical parameters:
| Tonnage: | up to 0,5 kg |
| Angle rotation round vertical axis: | 340° |
| Rotation angle for horizontal axis: | 150° |
| Maximal overhang of chaplet: | 350 mm |
| Positioning: | 1344 points of working space |
| Precision positioning: | +/-3 mm |
| Weight: | 55 kg |
Developers:
Doc. Ing. Ján Šturcel, PhD. and collective
Gallery:
| |
 |
 |
 |