Pneumatický manipulátor PM 01
História:
Pneumatický manipulátor PM 01 vznikol v osemdesiatych rokoch minulého storočia na Katedre automatizácie a regulácie vtedajšej EF SVŠT v Bratislave. Spolu s pôvodnou riadiacou jednotkou bol vytvorený celý (vrátane čítačky diernej pásky) z pneumatických prvkov systému Dreloba. Základnými požiadavkami pri jeho návrhu boli spoľahlivosť, jednoduchosť a názornosť.
Využitie:
Laboratórny manipulátor s programovým riadením bol určený na použitie v pedagogickom procese v odbore Technická kybernetika, zameranie Robotika.
Konštrukcia a riadenie:
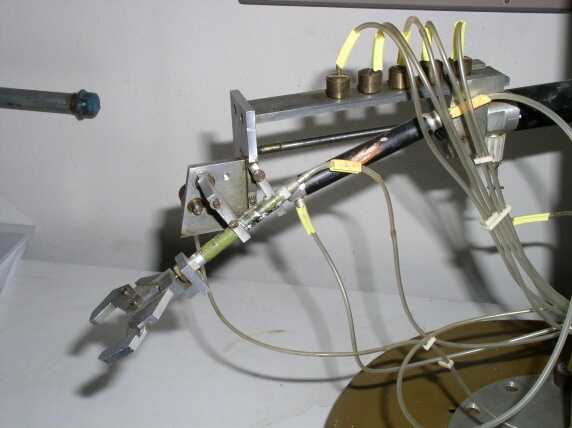
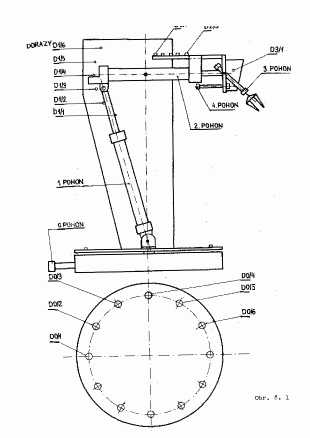
Pneumatický manipulátor je schématicky zobrazený na obrázku v galérii. Dvojčinné pohony P0 až P3 slúžia na polohovanie pracovného ramena. Pohon P4 je jednočinný a slúži na zovretie chápadla. Rozovretie chápadla zabezpečuje vinutá pružina, ktorá je súčasťou pohonu P4.
Manipulátor pracuje v sférických súradniciach, pričom pracovným priestorom je guľový segment. Má štyri stupne voľnosti a jeho technologická hlavica môže zaujať jeden z 1344 bodov pracovného priestoru.
Všetky pohony použité na stavbu manipulátora sú z pneumatického systému Dreloba. Uvedená stavebnica obsahuje okrem ďalších stavebných prvkov aj elektro-pneumatické a pneumaticko-elektrické prevodníky, ktoré boli vhodné použiť na elektrické ovládanie manipulátora. Nakoľko v prvej verzii neboli využité a tak bola celá riadiaca jednotka vrátane čítačky diernej pásky pneumatická. Postupným vývojom robota boli použité 3 typy riadiacich jednotiek: pneumatická, elektronická a programovateľná riadiaca jednotka.
Pneumatická riadiaca jednotka (1981):
Umožňuje ovládať rameno buď z pneumatického snímača diernej pásky, alebo z ovládacieho pultu. Riadiaci automat s pneumatickou riadiacou jednotkou disponuje s pevným programom, ktorý pracuje výhradne na báze pneumatických prvkov, takže má zabudovaný pevný polohovací cyklus.
Riadenie polohovacieho cyklu je zabezpečené časovacími RC pneumatickými prvkami a pri dvoch pohonoch pomocou je so spätnou väzbou. Opakovaním polohovacieho cyklu sa rameno striedavo premiestňuje do referenčnej a funkčnej polohy určovanej programom na diernej páske. Polohovací cyklus je po stránke obvodovej realizácie mimoriadne jednoduchý, no z funkčného hľadiska má niekoľko nedostatkov:
• trajektória chápadla je niekoľkonásobne dlhšia ako optimálna
• zložité polohovanie a zadávanie inštrukcií
• nie je riešená optimalizácia pohybov robota
Elektronická riadiaca jednotka (1982):
Riadiaca jednotka bola vytvorená na báze TTL logiky a tranzistorov a spolu pracujú ako sekvenčný elektronický obvod.
Vstupné signály sa môžu generovať ručne, alebo z fotoelektrického snímača diernej pásky. Na kódovanie inštrukcií sa používa 8-bitové slovo, v ktorom kód inštrukcie predstavujú posledné tri bity. Nevýhodou tohto riadenia je aj komplikované zadávanie inštrukcií, optimalizácia pohybu je riešená len čiastočne.
Programovateľný riadiaci automat (1984):
Niekoľko výhod v programovaní prinieslo použitie školského mikropočítačového systému ŠMS VÚVT (Žilina) na báze procesora Intel 8080. Program umožnil pohyb niekoľkými pohonmi súčasne a taktiež umožnil optimalizovať čakacie slučky. Program procesora 8080 bol tvorený v programovacom jazyku asembler.
Technické parametre:
| Nosnosť: | do 0,5 kg |
| Uhol otáčania okolo vertikálnej osi: | 340° |
| Uhol otáčania okolo horizontálnej osi: | 150° |
| Maximálne vyloženie hlavice: | 350 mm |
| Polohovanie: | 1344 bodov pracovného priestoru |
| Presnosť polohovania: | +/-3 mm |
| Hmotnosť: | 55 kg |
Na vývoji sa podielali:
Doc. Ing. Ján Šturcel, PhD. a kol.
Galéria:
| |
 |
 |
 |