ROTES
História:
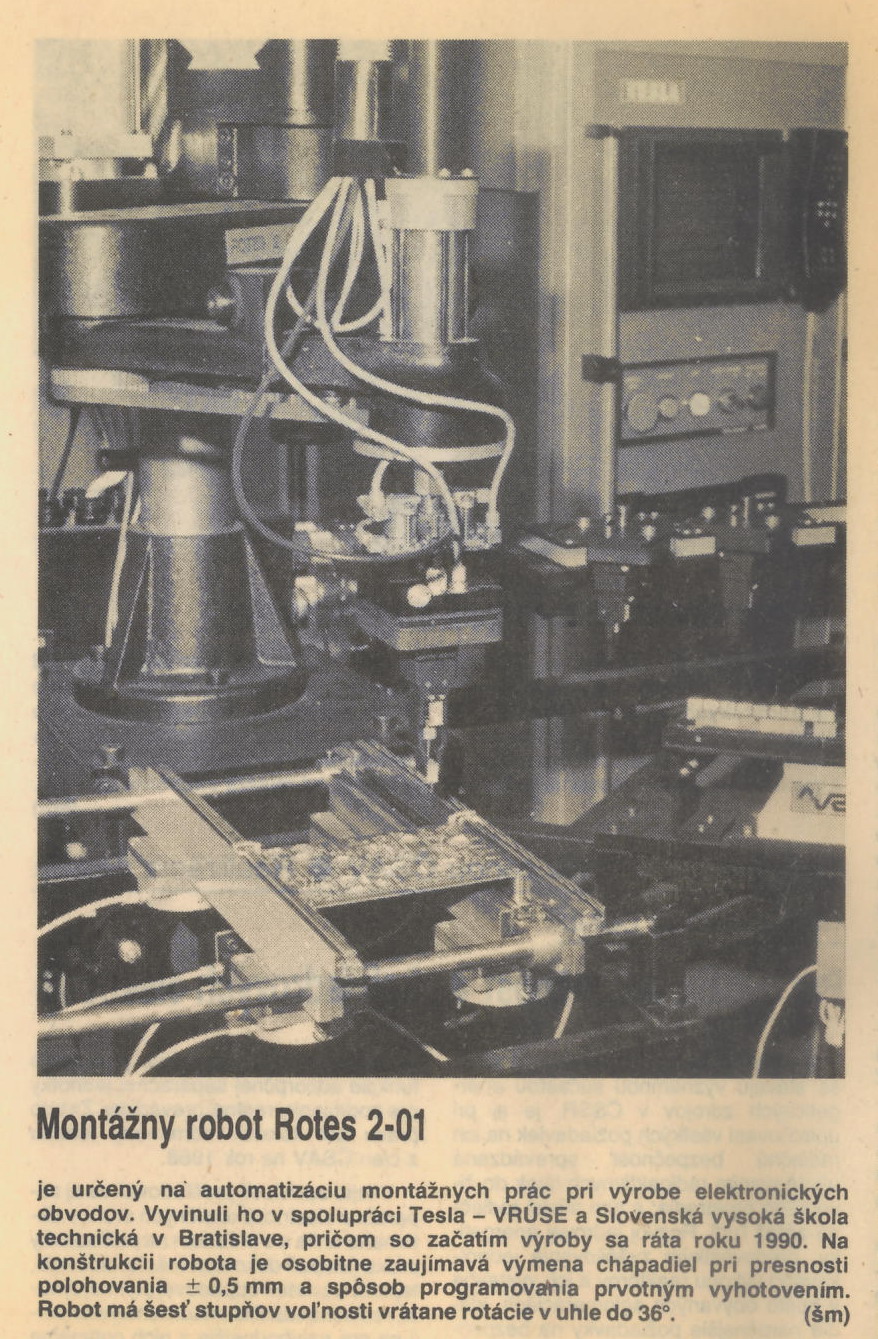
V rokoch 1986-87 vznikol nápad zostrojiť montážneho robota, ktorý mal zautomatizovať montážne práce pri výrobe a osádzaní plošných spojov pre firmu TESLA.
Na vývoji a výskume sa podieľal TESLA VRÚSE (Výskumný realizačný ústav slaboprúdovej elektroniky) a realizačný tím z Elektrotechnickej fakulty SVŠT v Bratislave, ktorý mal veľké skúsenosti s riadením krokových motorov.
Využitie:
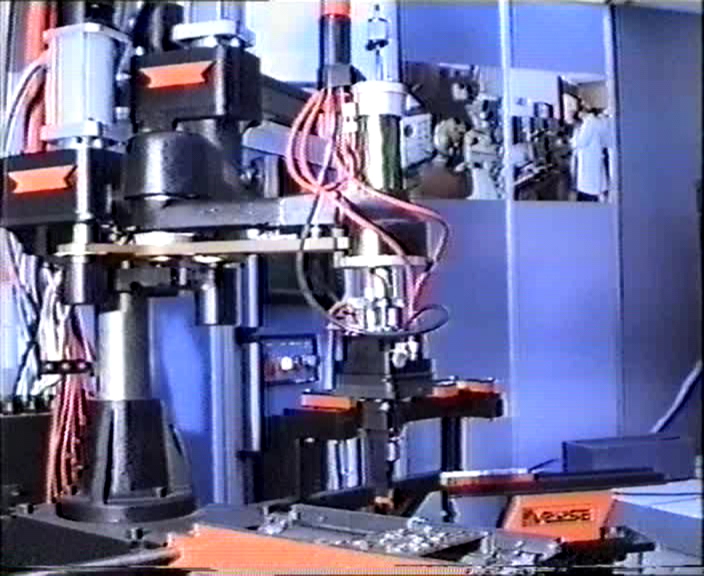
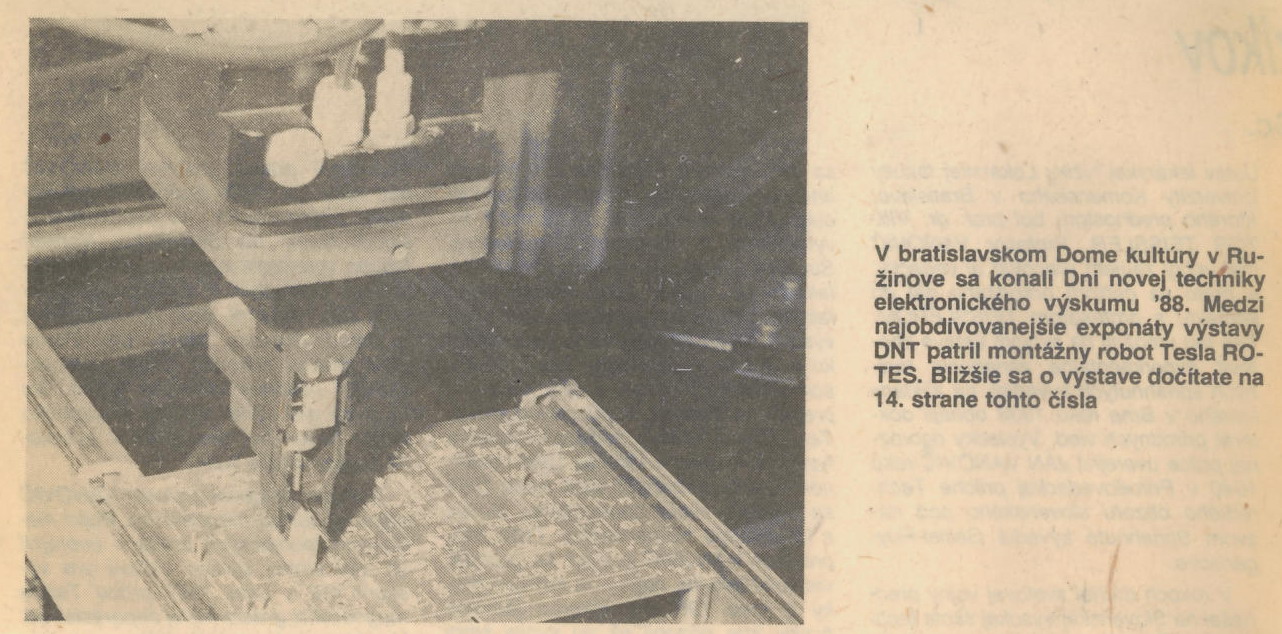
Hlavné určenie robota bolo zakladanie elektronických súčiastok do dosiek s tlačenými spojmi pre rozhlasové a televízne prijímače, počítače a pod.
Konštrukcia a riadenie:
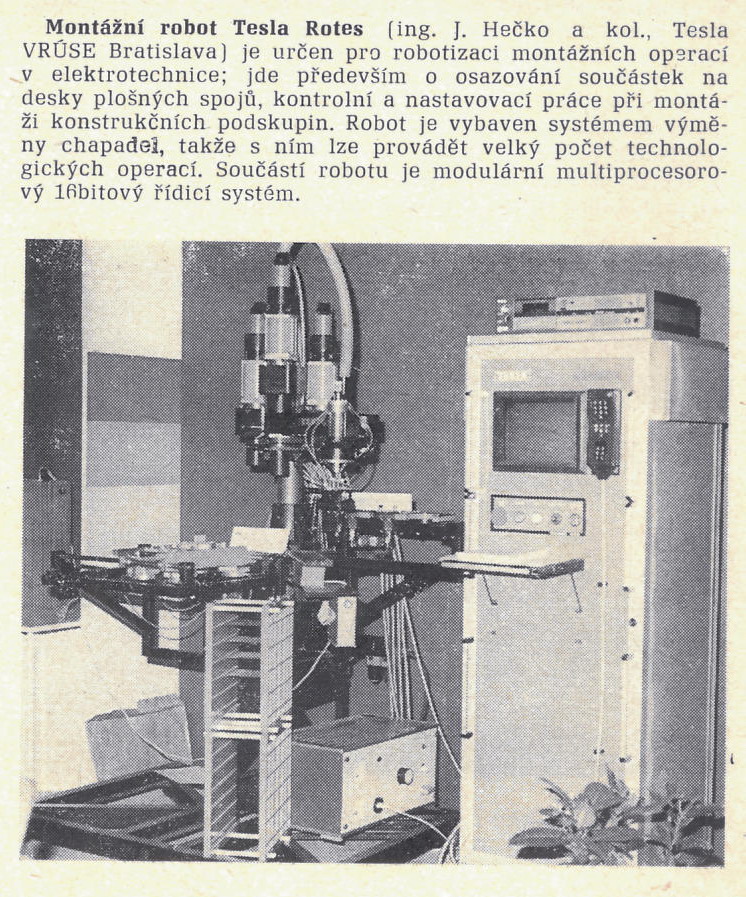
Robot bol vybavený automatickou výmenou chápadiel, čo z neho robilo veľmi univerzálneho robota s veľkými možnosťami technologických využití. Chápadlá boli navyše vybavené spätnou väzbou, ktorá umožňovala adekvátnu reakciu robota pri nesprávnom uchopení súčiastky.
Servosystémy robota boli koncipované na báze krokových motorov, kde bola pružná spätná väzba (riadenie momentu) a polohovou spätnou väzbou (riadenie polohy). Krokové motory boli schopné vykonať 200 krokov na jednu otáčku, kde bolo možné drobením každého jedného kroku získať ešte 25mikrokrokov.
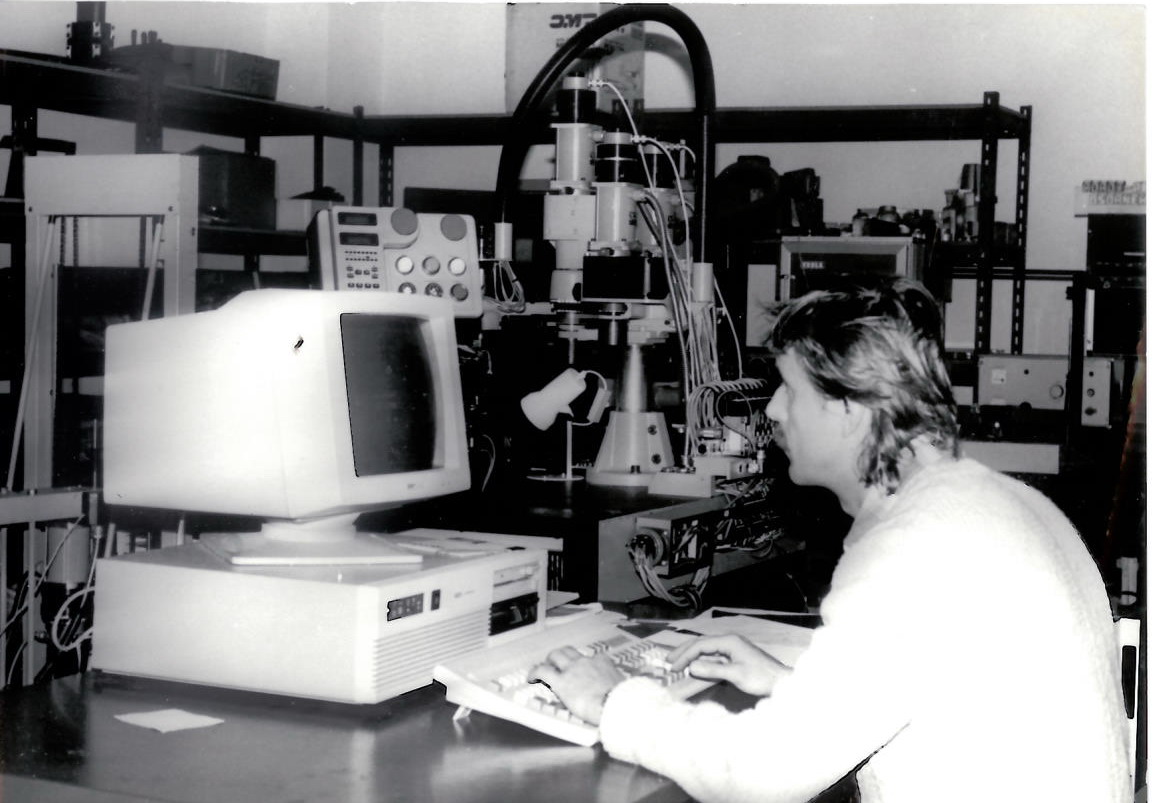
Riadenie počítača bolo realizované mikropočítačom na báze 16-bitového mikroprocesora (Intel 8086). Riadiaca jednotka sa programovala „naučením“ na základe povelov z klávesnice, potom bol robot schopný vykonávať požadovanú trajektóriu. Pri vykonávaní naučenej trajektórie robota, počítač vysiela do RJ údaje obsahujúce informácie o počte krokov motorov a rýchlostiach pre jednotlivé pohony.
Riadenie v offline režime na ktorom sa pracovalo, nebolo nikdy dokončené.
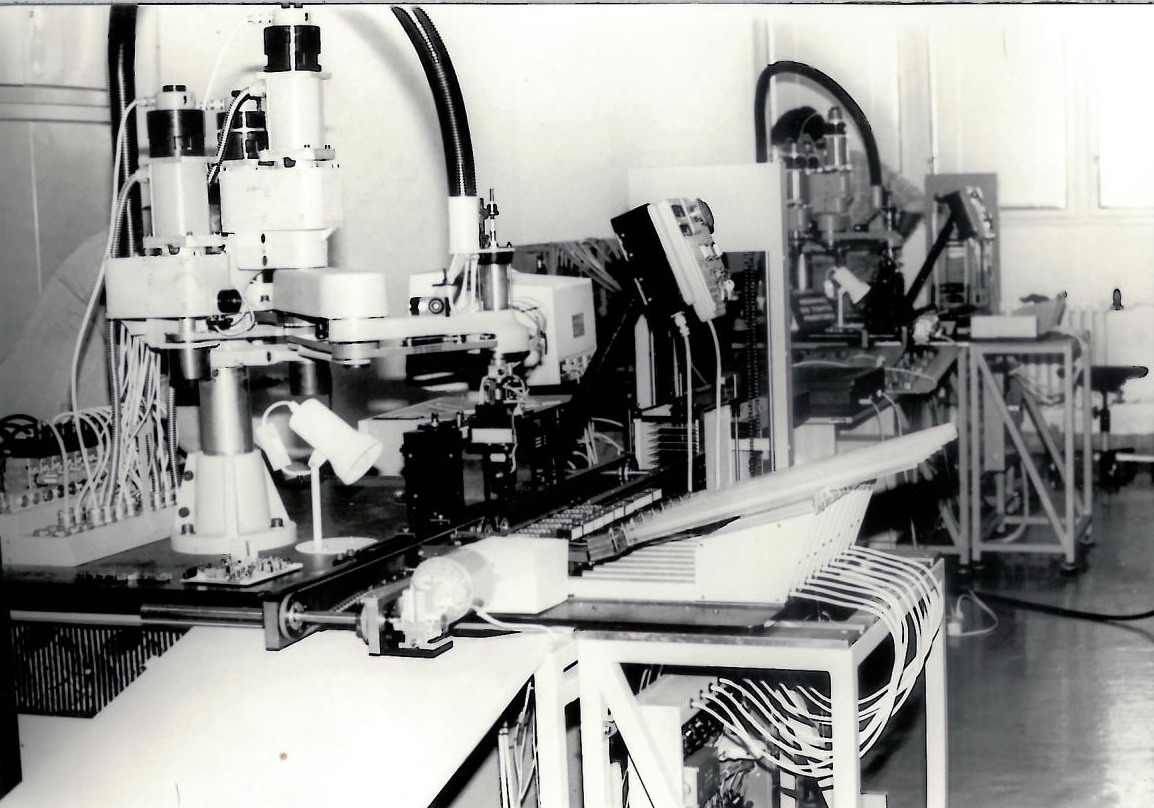
Rotes mal 4-5 servopohonov, pričom 3 boli pre pohyb technologickej hlavice a 4-5 boli pre pohyb zásobníka. V štádiu prípravy bolo až 6-7 servopohonov, kde sa uvažovalo o zahýbaní nožičiek súčiastok. Maximálna rýchlosť chápadla sa pohybovala okolo 2m/s.
Ocenenia:
Na medzinárodných výstavách ROBOT ’88 v Brne a Dňoch techniky ’88 bol vystavený ako funkčný prototyp, kde patril medzi najobdivovanejšie exponáty výstavy.
V roku 1990 zanikol TESLA VRÚSE a taktiež sa zastavil akýkoľvek ďalší vývoj a neskoršia masová výroba. Vyrobený zostal iba jeden prototyp a dva funkčné vzory.
Technické parametre:
| Riadenie: | mikropočítač INTEL 8086 |
| Stupne voľnosti: | 3 |
| Pohon: | 3 x krokový motor MEZ Náchod |
| Pamäť robota: | CMOS |
| Rýchlosť techn. hlavice: | 2 m/s |
Na vývoji sa podielali:
doc. Ing. Peter Hubinský, PhD., CSc., Ing. Stanislav Almássy, CSc., Ing. Pavol Sivíček, CSc., Ing. Alexander Varga, Ing. Milan Plechlo
Galéria:
| |
 |
 |
 |
 |
 |