XY Robot
History:
In 80´s there was the beginning of developing group of people from KAR STU. They cooperated with VRÚSE Pěchovice and VUMA Nove Mesto nad Vahom. They produced the control for XY stepping motor that should have served for the microelectronical technologies used in the industry.
Constrution and control:
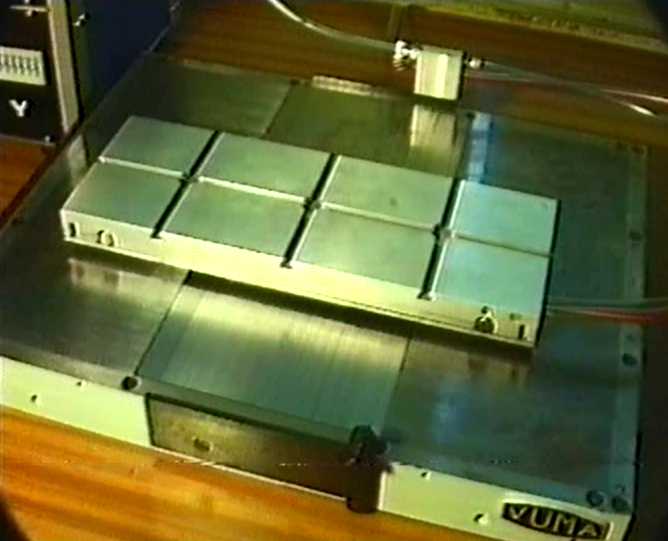
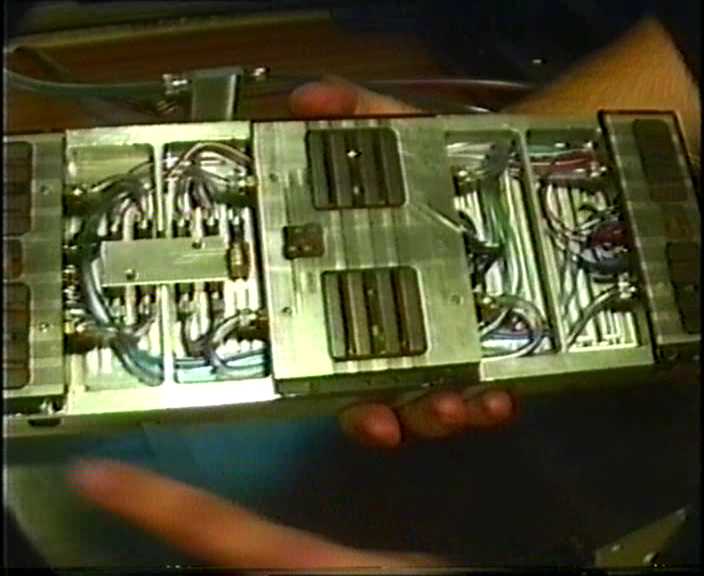
The flexible part of the robot is based on the air pillow. Therefore it is needful to have high pressure cca 4OokPa. Very thin air gap is created under the flexible part. There are some jets that are needful for the punctual specification of the flow of the pressure of the air. Scanners serve to tell us the punctual positioning of te flexible part. Motor that is situated on the flexible part brings the winding of X – axis and Y – axis. Mechanical step of the motor was 512 micrometres. The control unit of the robot provides the devision and the safety of the required streams. The movement of the robot was possible in both axis at the same time. The weight that is proper for the robot XY is 16 kilograms.
Conclusion:
Such solution of the punctual positioning of the robot XY could serve as for example the portal for the next tasks in the automatisation or for the next different punctual positioning.
Developers:
Ing. Stanislav Almássy, CSc., Ing. Pavol Sivíček, CSc., Ing. Alexander Varga
Gallery:
| |
 |
 |