XY Robot
História:
V osemdesiatych rokoch 20. storočia začal vývojový tím ľudí z KAR STU spolupracovať s VRÚSE Pěchovice a VUMA Nové mesto nad Váhom na výrobe riadenia pre XY krokového motora, ktoré malo slúžiť pre mikroelektronické technológie používané v priemysle.
Konštrukcia a riadenie:
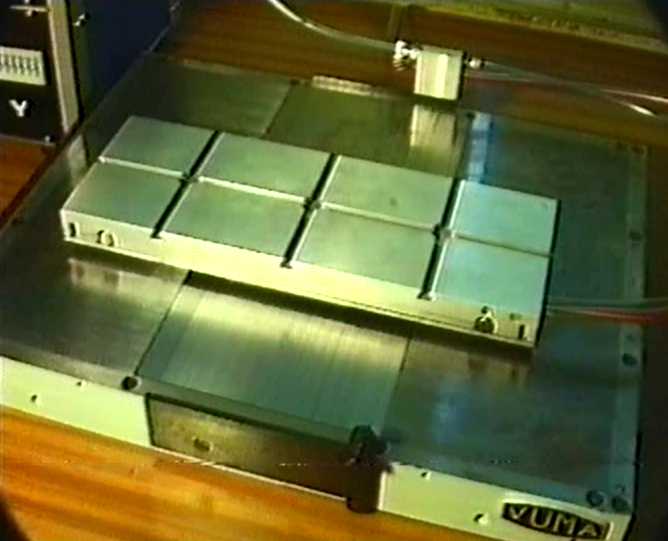
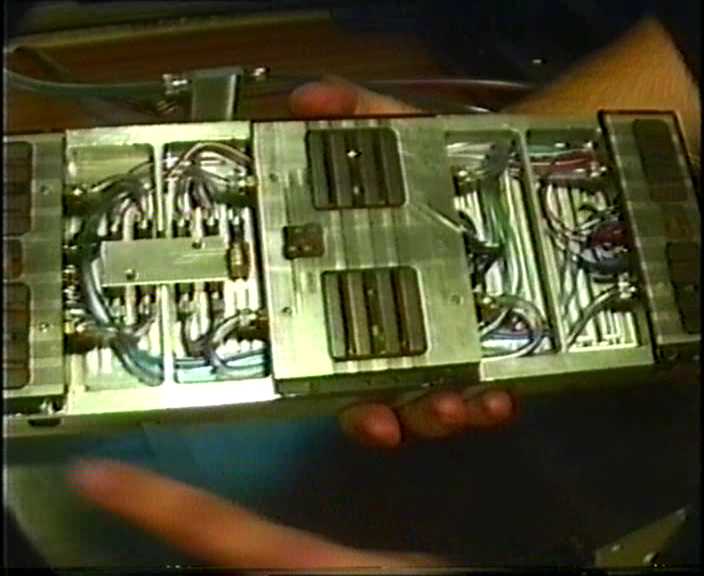
Pohyblivá časť robota spočíva na vzduchovom vankúši, pre ktorý je potrebný vysoký tlak, rádovo 400kPa. Pomocou tohto tlaku sa vytvára pod pohyblivou časťou veľmi tenká vzduchová medzera, kde sú zo spodnej časti umiestnené dýzy potrebné na presné určenie prúdenia tlaku vzduchu. Na presne polohovanie pohyblivej časti slúžia snímače.
Motor, ktorý je umiestnený na pohyblivej časti, nesie zo sebou vinutia osi X a osi Y. Mechanický krok motora, ktorý bol vytvorený bol 512 mikrometrov. Bol elektronicky delený tak, že 1 inkrement dráhy predstavoval 2 mikrometre. Delenie a zabezpečenie žiadaných prúdov zabezpečuje riadiaca jednotka robota. Pohyb robota bol možný v oboch osiach súčastne. Hmotnosť s ktorou dokáže robot XY hýbať a presne polohovať je až 16kg.
Zhrnutie:
Takéto riešenie presného polohovania robota XY mohlo slúžiť napr. ako portál pre rôzne ďalšie manipulačné práce v automatizácii alebo na rôzne iné presné polohovanie využité a zakomponované do technologického procesu výroby.
Na vývoji sa podielali:
Ing. Stanislav Almássy, CSc., Ing. Pavol Sivíček, CSc., Ing. Alexander Varga
Galéria:
| |
 |
 |