JORI

História:
Cieľom projektu Ing. Jozefa Dúbravského bolo navrhnúť optimálne technické riešenie pre riadenie mobilného robota pomocou rádiového spojenia s predpokladom budúceho zabudovania riadiaceho systému autonómnej činnosti.
Využitie:
V súčasnosti sa diaľkovo ovládané mobilné robotické systémy využívajú ako dopravné systémy, manipulátory v prostrediach nedostupných človeku, prieskumné roboty v rozmerovo malých alebo pre človeka nebezpečných objektoch a v neposlednom rade aj ako hračky. Robotický systém JORI 01 bola štvorkolesová mobilná platforma, postavená na princípe modulárnosti, ktorá primárne slúži k pedagogickému účelu.
Konštrukcia a riadenie:
Bola vytvorená všeobecná koncepcia nadradeného komunikačného systému, ktorá bola upravená tak, aby zodpovedala požiadavkám konkrétneho typu mobilného robotického prostriedku. Robotický systém bol založený na podvozku Tamiya 58231 Wild Dagger.
Celý projekt mal za cieľ vytvoriť samostatný systém schopný autonómnej prevádzky. Keďže ide o zložitý komplexný problém, zrealizovaný prototyp vykonáva funkcie, ako sú napríklad riadenie rýchlosti, meranie elektrických a mechanických veličín a pod., zatiaľ čo spracovanie údajov zo snímačov a riadenie pohybu robota je rezervované pre vzdialený nadradený systém, respektíve modul autonómnej činnosti. Vďaka modulárnosti riešenia je možné do funkčného prototypu vkladať ďalšie zlepšenia.
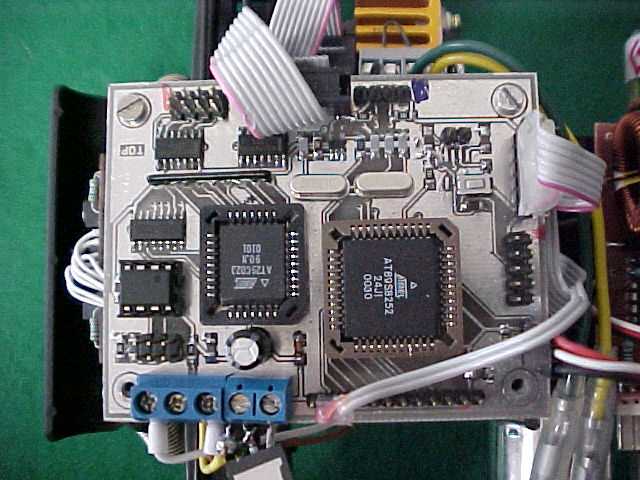
Na podvozku Tamiya 58231 Wild Dagger, bol nainštalovaný nadradený riadiaci modul podsystému riadenia pohonu s procesorom Atmel AT89S8252, rádiomodem RM-350 firmy MicroStep – MIS, 2 výkonové H-mosty s meraním prúdu, napätia a teploty. Mikroprocesor pomocou jednoduchého softwaru riadil servo riadenia smeru, základnú komunikáciu po I2C zbernici, sériovú komunikáciu s rádiomodemom a pod.
Podsystém riadenia pohonu podvozku predstavuje samostatný systém pre zabezpečenie chodu podvozku. Z palubnej zbernice prijíma dáta o rýchlosti, natočení serva smeru a snaží sa ich interpretovať v podobe pohybu podvozku. Robot je vybavený dvoma identickými motormi triedy Speed 600.
Komunikácia s robotickým prostriedkom je zabezpečená cez rádiomodemy od firmy MicroStep –MIS typu RM-350. Ako základný komunikačný prvok v ich zapojení sú využité moduly BiM-433-F od anglickej firmy Radiometrix Ltd.
Ide o nízkopríkonové UHF dátové vysielacie/prijímacie moduly s výkonom 10mW. Sú to miniatúrne poloduplexné (v jednom okamihu jeden ako prijímač a druhý vysielač alebo naopak) dáta prenášajúce moduly rýchlosťou až 40Kbit/s na vzdialenosť 30m v budovách a 120m na voľnom priestranstve. Vzhľadom na energetickú autonómnosť systému je zdrojom napájania robotického systému NiMh batéria.
Technické parametre:
| Riadenie: | mikroprocesor Atmel AT89S8252 |
| Pohon: | 2x motor triedy Speed 600 |
| Komunikácia s PC: | rádiomodemy typu RM-350 |
| Napájanie: | Sanyo 3000 mAh 6-pack |
| Celková výška: | 180 mm |
| Celková dĺžka: | 390 mm |
| Celková šírka: | 315 mm |
Zhrnutie:
Funkčný prototyp mobilného robotického prostriedku JORI 01 má svoje využitie v ďalšom pedagogickom procese. Otvorenosť koncepcie umožňuje pripájanie ďalších podsystémov a overovanie schopnosti ich vzájomnej spolupráce.
Na vývoji sa podielali:
Ing. Jozef Dúbravský, Ing. Richard Tesár a tím študentov: Ing. Martin Lipovský, Ing. Eva Prikrylová, Ing. Radovan Bakoš
Galéria:
| |
 |
 |
 |